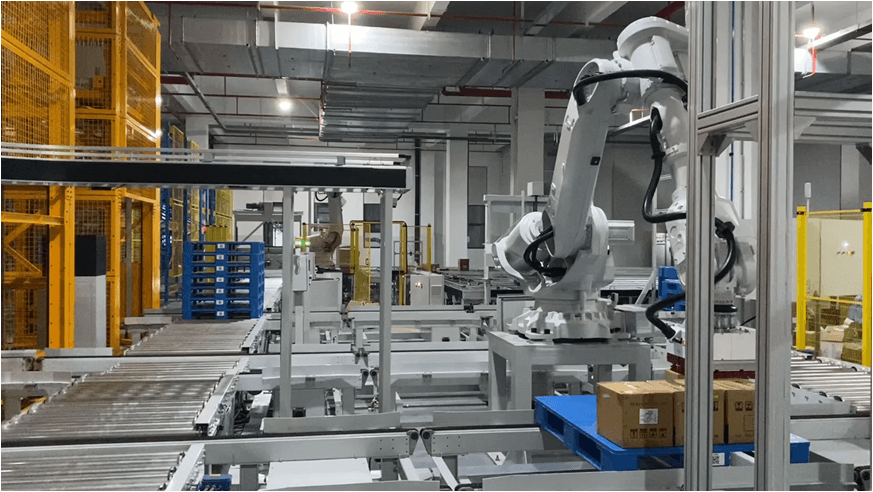
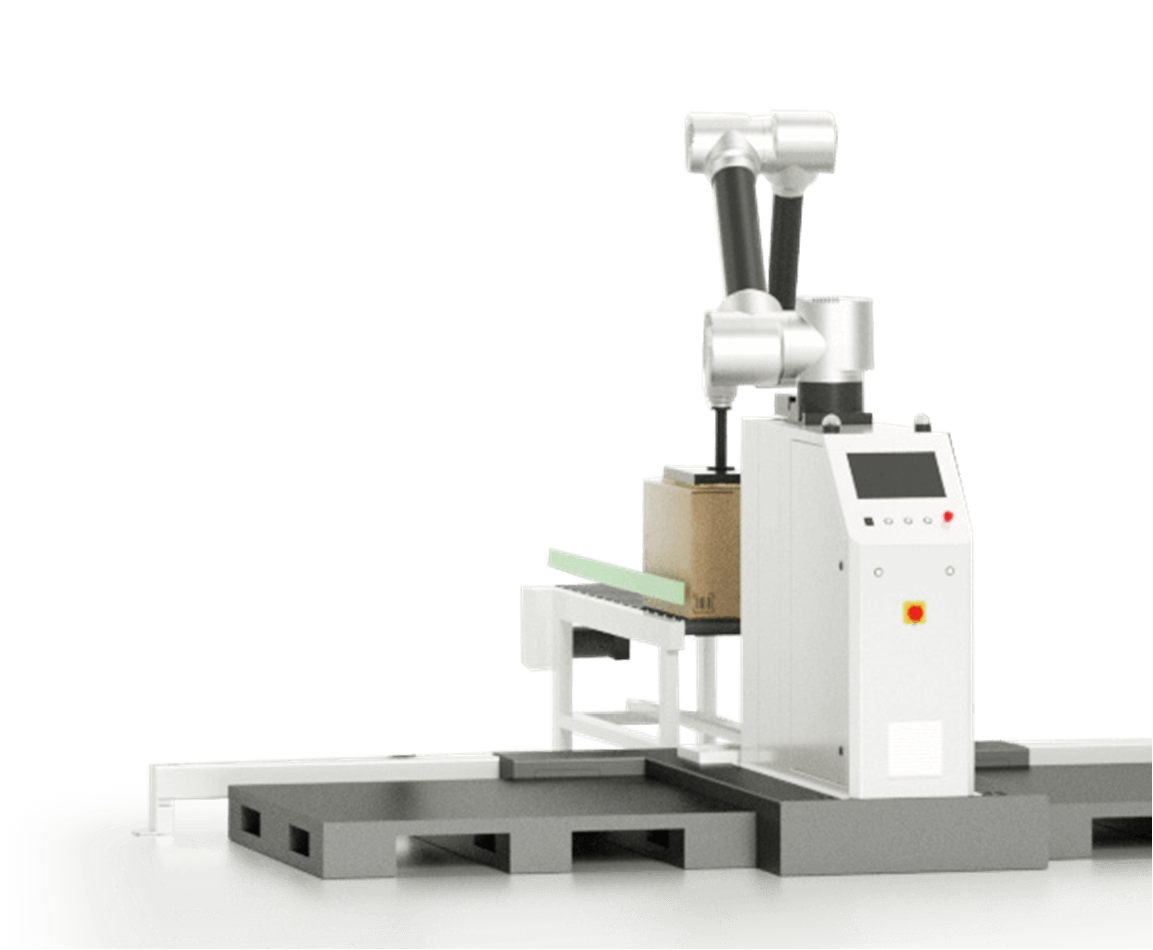
AGV复合机器人是配备有电磁感应、电子光学或其他全自动引导设备,可以沿所规定的引导途径行车,具备安全防护及各种移载的功能运送小车子。
AGV复合机器人以轮试移动为主要特征,相较徒步、爬取或其他非轮试移动机器人具备行为便捷、工作能力强、结构紧凑、可操控性强、安全系数好等优点。与物料输送常用的另一台对比,AGV复合机器人活动地区不用铺装路轨、支架架等定位装置,不会受到场所、路面与空间限制。因而,在自动化物流系统内,更能全面地反映其自动性和软性,完成高效率、经济发展、灵活多变的智能化生产制造。
激光导航

激光导航又分激光遮光板导航与自然导航二种:
激光遮光板导航要在AGV复合机器人行车途径的周边安装方式精准的反射板,激光扫描软件安装于AGV复合机器人车身上。激光扫描软件随AGV复合机器人的移动的与此同时传出激光束,发出激光束被沿AGV复合机器人行车途径铺装的多个反射板立即反射面回家,开启控制板纪录转动激光头碰到反射板时的视角。控制板依据这种角度值与具体的这一组遮光板位置相符合,算出AGV复合机器人的绝对坐标,根据这种基本原理完成十分精准的激光引导。
当然导航是由激光感应器认知周边环境。与激光导航不一样的是,不用在AGV复合机器人行车途径的四周组装用以的定位反射板或反光柱,当然导航定位标识物能是工作中环境下的墙壁、物件等相关信息。相较于激光遮光板导航,当然导航的工程成本与周期时间都比较低。
激光导航的优势:激光导航的形式促使AGV复合机器人可以灵便整体规划途径,目标清晰,行车途径灵活变通,工程施工比较方便捷,可以满足各种各样使用场景。
激光导航的缺陷:原材料成本高,对环境条件较也较高(外部光源,路面规定,可见度要求等)。
本文AGV复合机器人激光导航方式介绍:https://www.hcswell.com/industry-news/577.html,海川四维智能科技版权所有,抄袭必究!