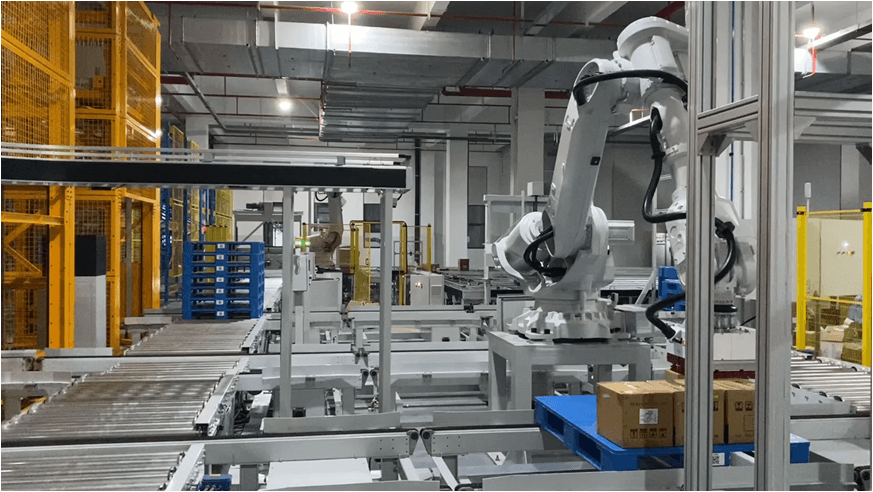
AGV复合机器人是一种能够自主行驶和执行任务的智能机器人系统。它在工业自动化领域发挥着重要作用。AGV复合机器人的核心技术包括导航技术、驱动技术和控制系统技术,这些技术共同构成了AGV机器人的关键能力。海川四维将围绕以下三个方面展开介绍。
1. 导航技术
AGV机器人的自主行驶能力建立在可靠的导航技术之上。目前主要的导航方式包括电磁导航、激光导航和视觉导航。电磁导航利用地面埋设的线圈或磁条进行定位;海川四维AGV复合机器人采用激光导航技术,激光导航则通过激光雷达实现环境地图的构建和定位;而视觉导航则依赖摄像头等传感器获取环境信息并进行位置识别。这些导航技术的发展使得AGV机器人能够在复杂的环境中准确行驶。

2. 驱动技术
AGV机器人的速度和加速度决定了其工作效率和响应能力,而驱动技术是实现这一目标的关键。电机驱动、液压驱动和气压驱动等多种方式,每一种都有其独特的优势。电机驱动灵活高效,液压驱动稳定强大,气压驱动适用于特殊环境。综合运用这些驱动技术,可以根据不同任务的需求,为AGV机器人提供定制化的动力支持,使其能够在工作中达到良好状态。
3. 控制系统技术
导航和驱动等功能的协同工作需要一个强大而智能的控制系统。控制系统技术不仅仅是将各项技术简单堆砌,更是要实现高效的整合与协同。通过先进的传感器技术,实时收集环境信息,通过强大的处理器进行分析和决策,实现对AGV机器人的全面掌控。这个系统不仅要稳定可靠,还要具备灵活性,以适应各种工作场景,实现AGV机器人的真正自主运行。
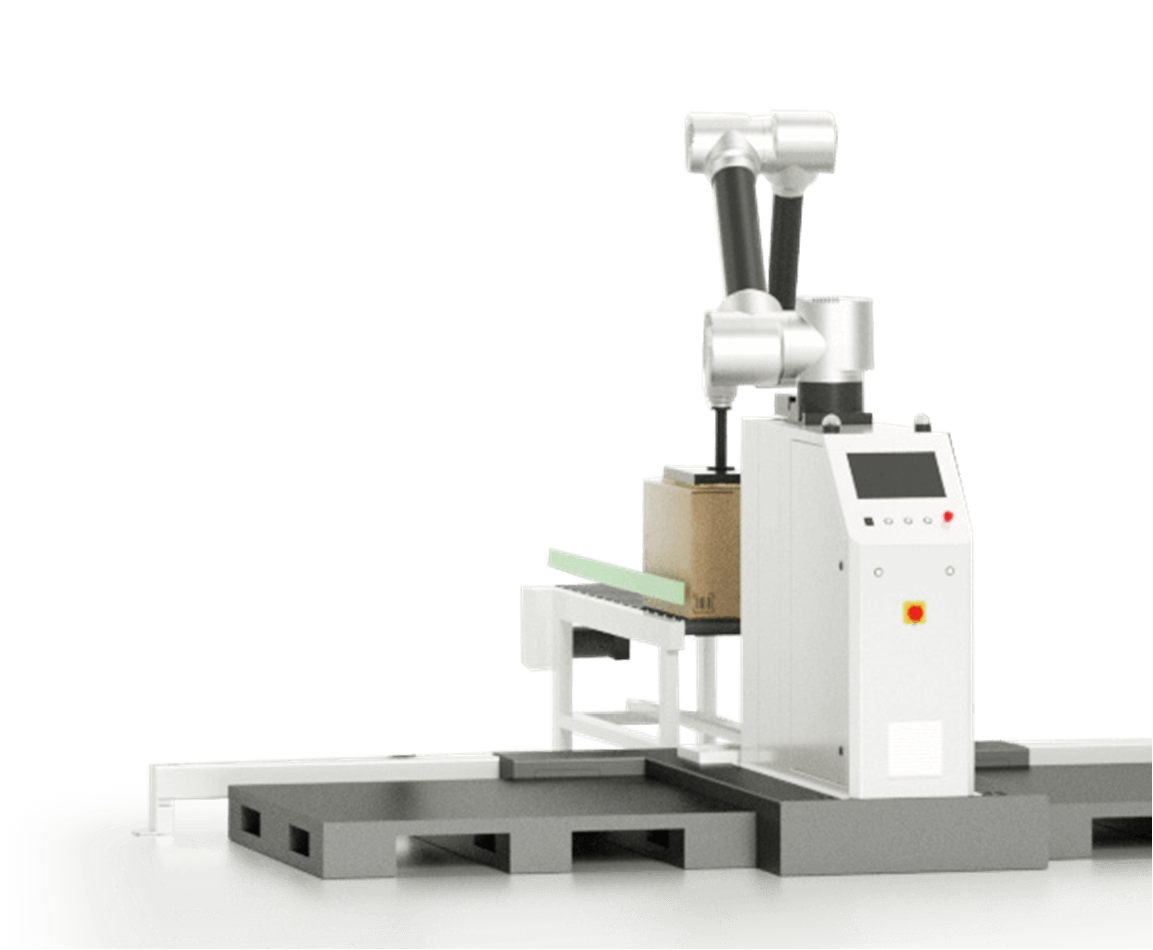
AGV复合机器人的核心技术不断演进和完善,为工业自动化和物流领域带来了巨大的便利和效益。其核心技术是一个多学科、多技术融合的体系,其导航、驱动和控制系统的高度协同是实现自主运行的关键。海川四维AGV复合机器人的应用机械臂可根据需求进行更换,为生产过程带来更高的效率和更可靠的表现。
本文AGV复合机器人核心技术(探索AGV复合机器人的核心技术):https://www.hcswell.com/industry-news/811.html,海川四维智能科技版权所有,抄袭必究!