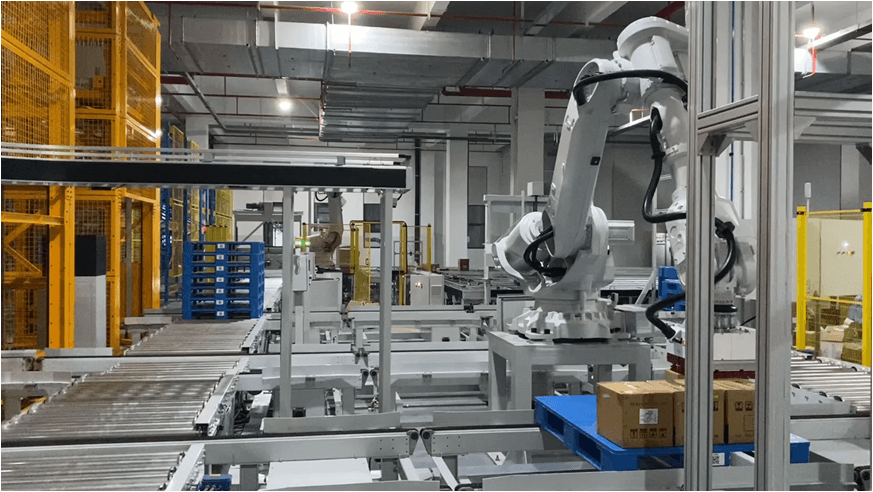
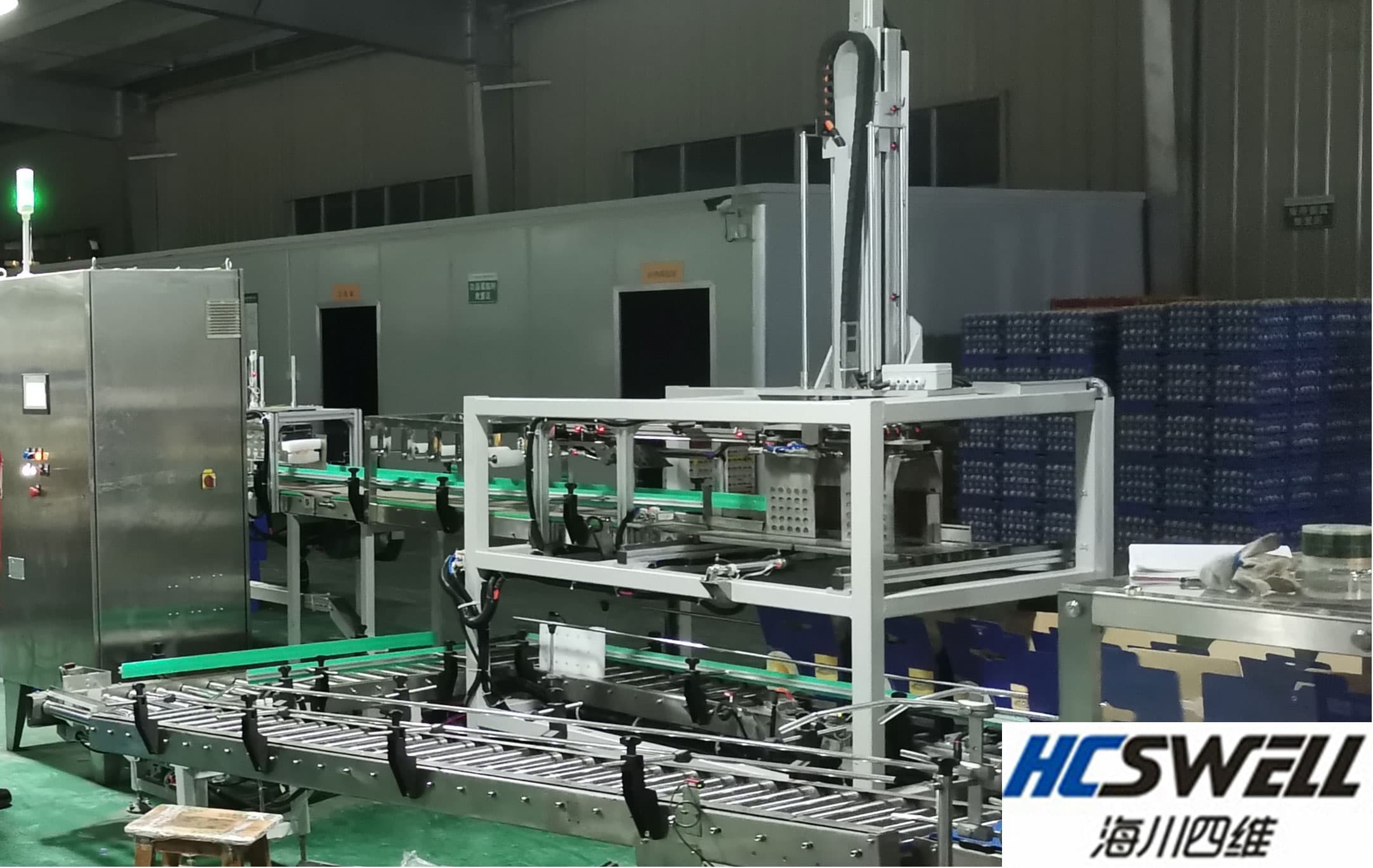
伴随着加工制造业的高速发展,企业对智能化生产的需要日益提高。协作移动码垛机器人的产生,满足企业对高效率、精确、灵活多变的堆垛工作的需要。根据市场需求调研数据显示,市场容量预计在未来数年将不断扩大。与此同时,在医药、食品类、货运物流等行业中,运用也越来越广泛。海川四维解析协作移动码垛机器人工作原理。
1.感知:
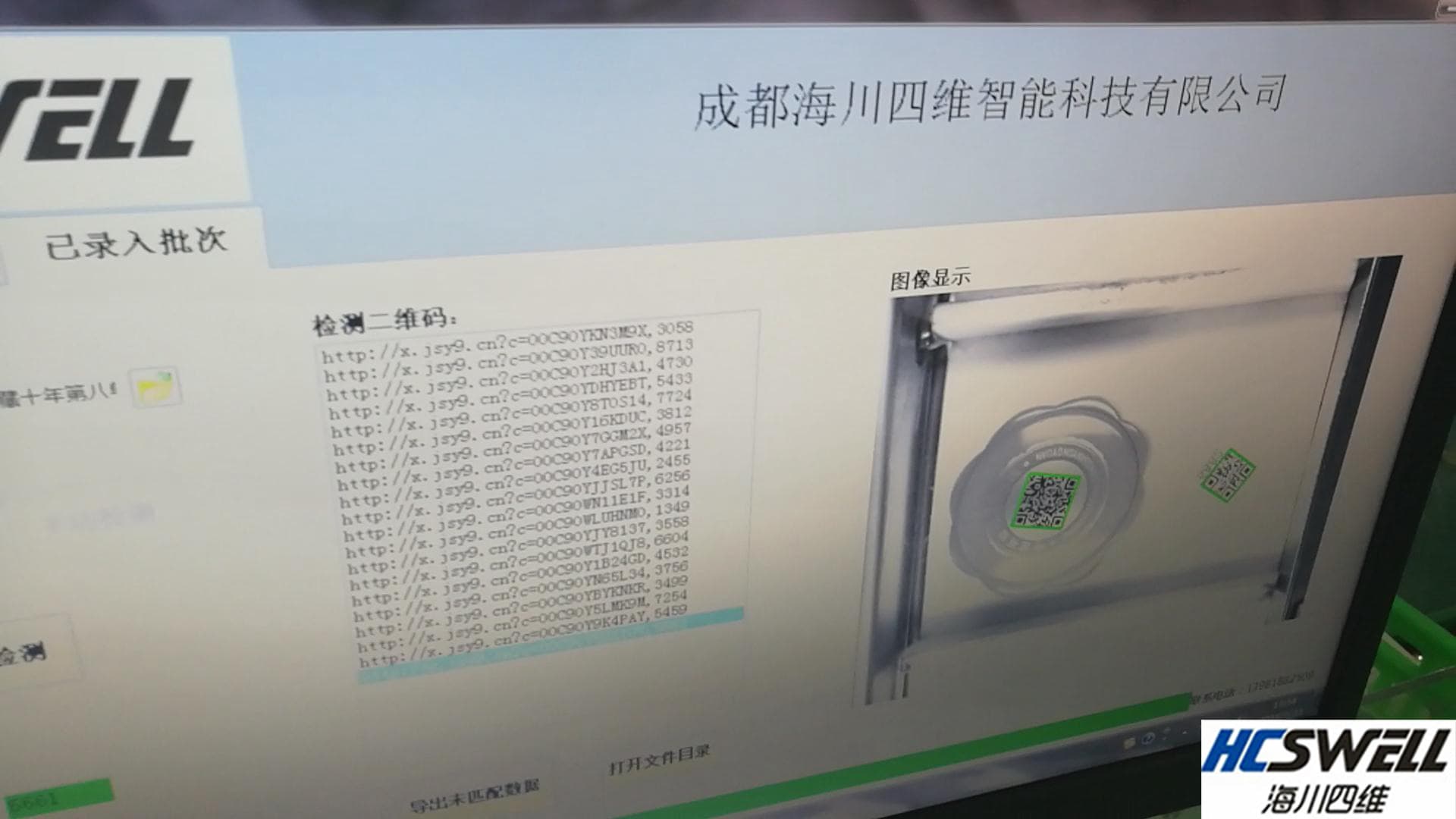
感知是协作移动码垛机器人的第一个关键因素。机器人根据配备机器视觉技术和深度学习等技术手段来完成物品识别和定位。视觉检测系统可以利用镜头或激光雷达等传感器获得环境信息,并且对场景下的总体目标物品进行检测和识别。人工智能算法也可以根据已经有的数据进行练习,使机器人能够及时地识别不同形状、尺寸和颜色的物体,为后续的抓取和摆放提供参考。
2.认知能力:
认知是协作移动码垛机器人的核心能力之一。在感知到目标物品后,机器人必须通过对环境理解和分析,制定合适的策略来完成任务。这需要靠现代化的算法和模型,如机器学习算法、大数据技术。根据对物品特点、环境现状等展开分析,在各个可选择动作中选择合理的的抓取方式及路径规划,以提升机器人的工作效率和精确性。

3.运动整体规划:
运动规划是协作移动码垛机器人完成精准实际操作的关键步骤。在认知阶段确认了合适的抓取和摆放策略后,机器人必须将其转化为具体运动命令。运动规划算法可以根据目标一个物体部位、姿态和机器人自已的约束条件,算出较好的抓取路径和移动运动轨迹。通过有效整体规划运动途径,机器人可以避免碰撞和操作失误,确保精准的抓取和存放全过程。
4.调节:
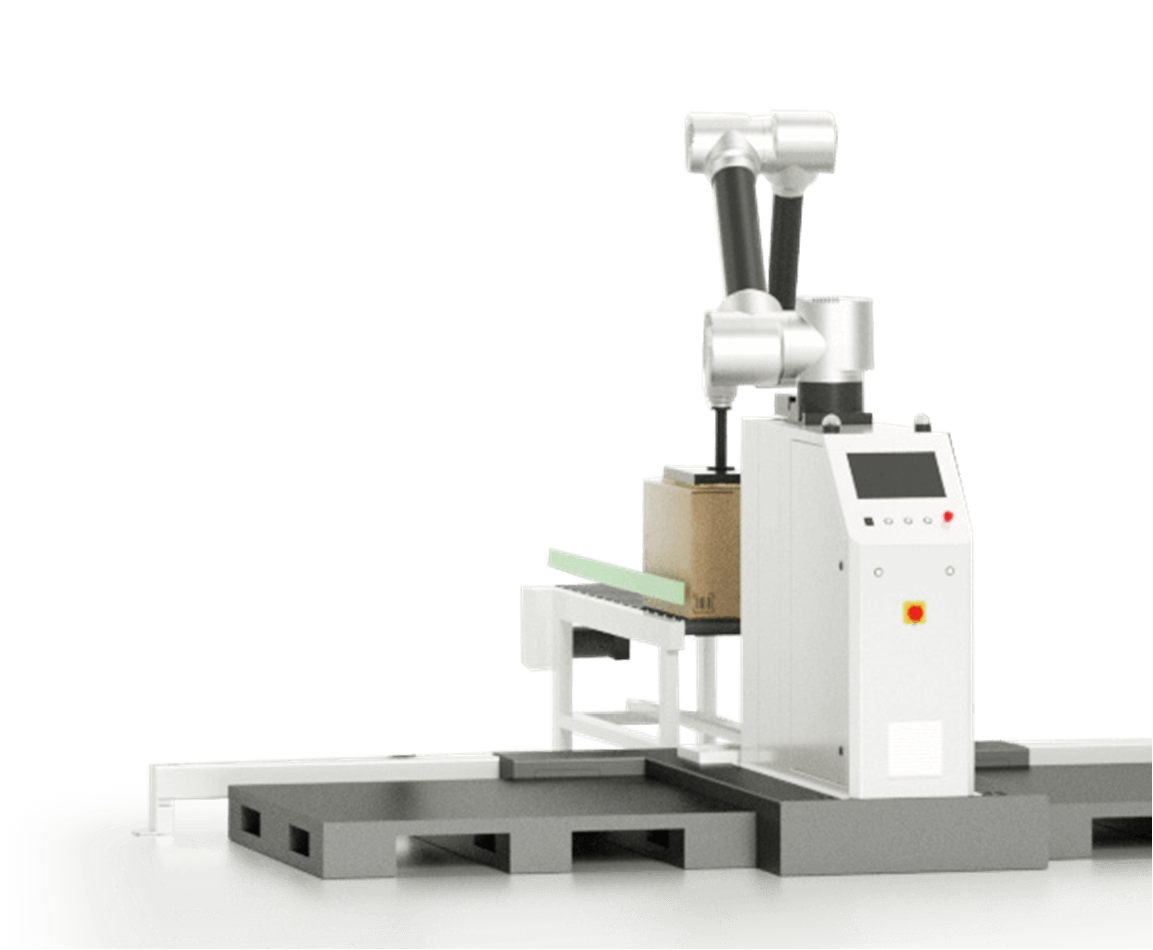
调节是协作移动码垛机器人的执行阶段。根据控制系统,海川四维协作移动码垛机器人可以将运动整体规划获得的指令转化成具体设备动作,完成抓取、搬运和摆放等操作。控制系统一般由传感器、执行机构和控制系统组成,其中传感器用以感知机器人系统状态,执行机构用于控制机器人的运动。根据实时检测和优化,机器人可以保持稳定的姿势以实现精确的动作。
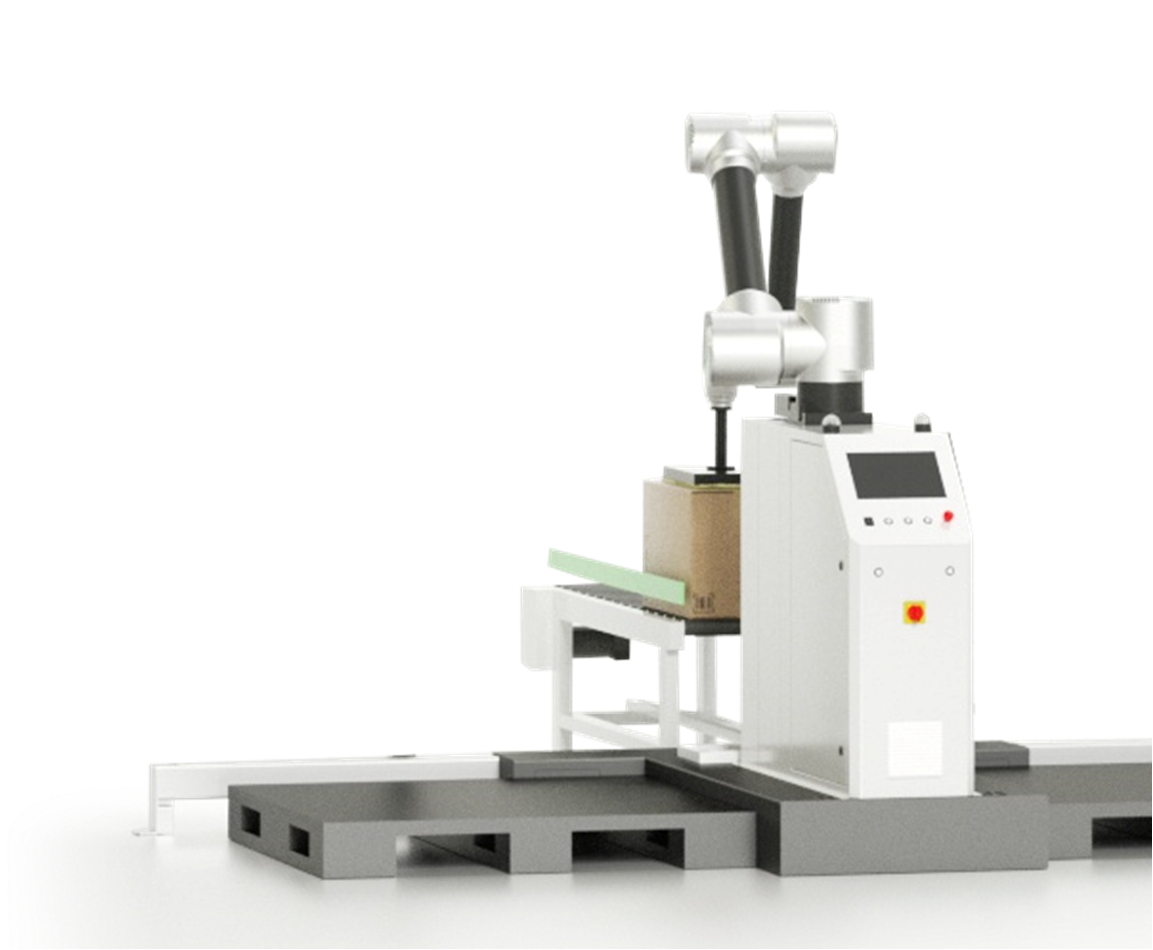
协作移动码垛机器人可以极大的缩短产线换线时间,是一种高效的自动化装卸货物的机器人系统通过成熟的感知技术和算法,机器人能够准确地识别目标物体;这些关键技术使得海川四维协作移动码垛机器人能够高效地完成货物的码垛任务,提高了生产效率和降低了人力成本。
本文协作移动码垛机器人的运行结构与关键技术解析(海川四维协作移动码垛机器人的运行原理):https://www.hcswell.com/industry-news/816.html,海川四维智能科技版权所有,抄袭必究!