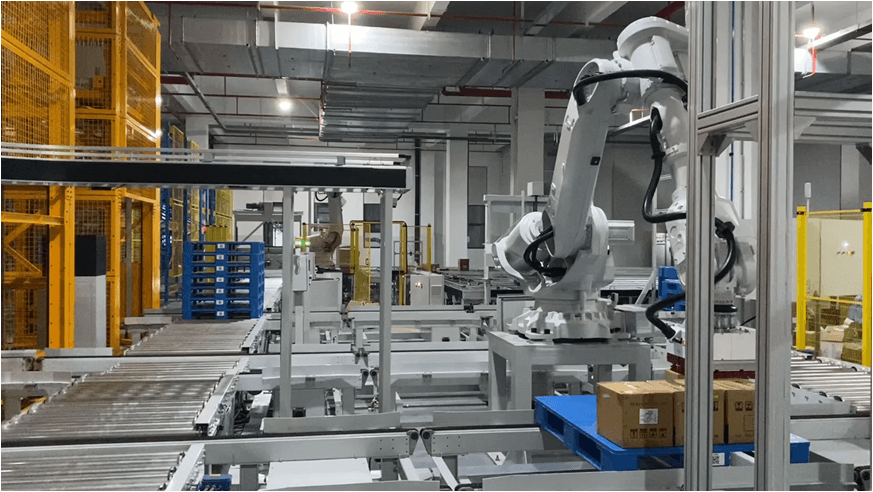
近年来,随着物流行业的发展和自动化技术的进步,3D拆垛机器人逐渐受到广大企业的青睐。它以其高效、精准的拆垛能力,为仓储物流领域带来了革命性的变化。3D拆垛机器人主要由视觉部分、触摸屏人机交互画面、机械机构部分和处理系统部分组成,它们共同协作,实现高效的拆垛工作。那么,让我们和海川四维一起揭秘3D拆垛机器人的工作原理,看看它是如何实现高质量的拆垛工作的。
1、 构件分析
3D拆垛机器人主要由视觉部分、触摸屏人机交互画面、机械机构和处理系统部分组成。这些构件相互配合,实现了机器人系统的高效运行和智能控制。视觉系统通过3D工业相机,确保机器人能够准确感知和识别各种不同的物体,从而开展后续的拆垛工作。同时,触摸屏人机交互画面为操作员提供了直观友好的操作界面,方便用户对机器人进行灵活的控制和监控。而机械机构和处理系统的协同工作,则为机器人系统的实际操作提供了坚实的基础。
2、 视觉系统
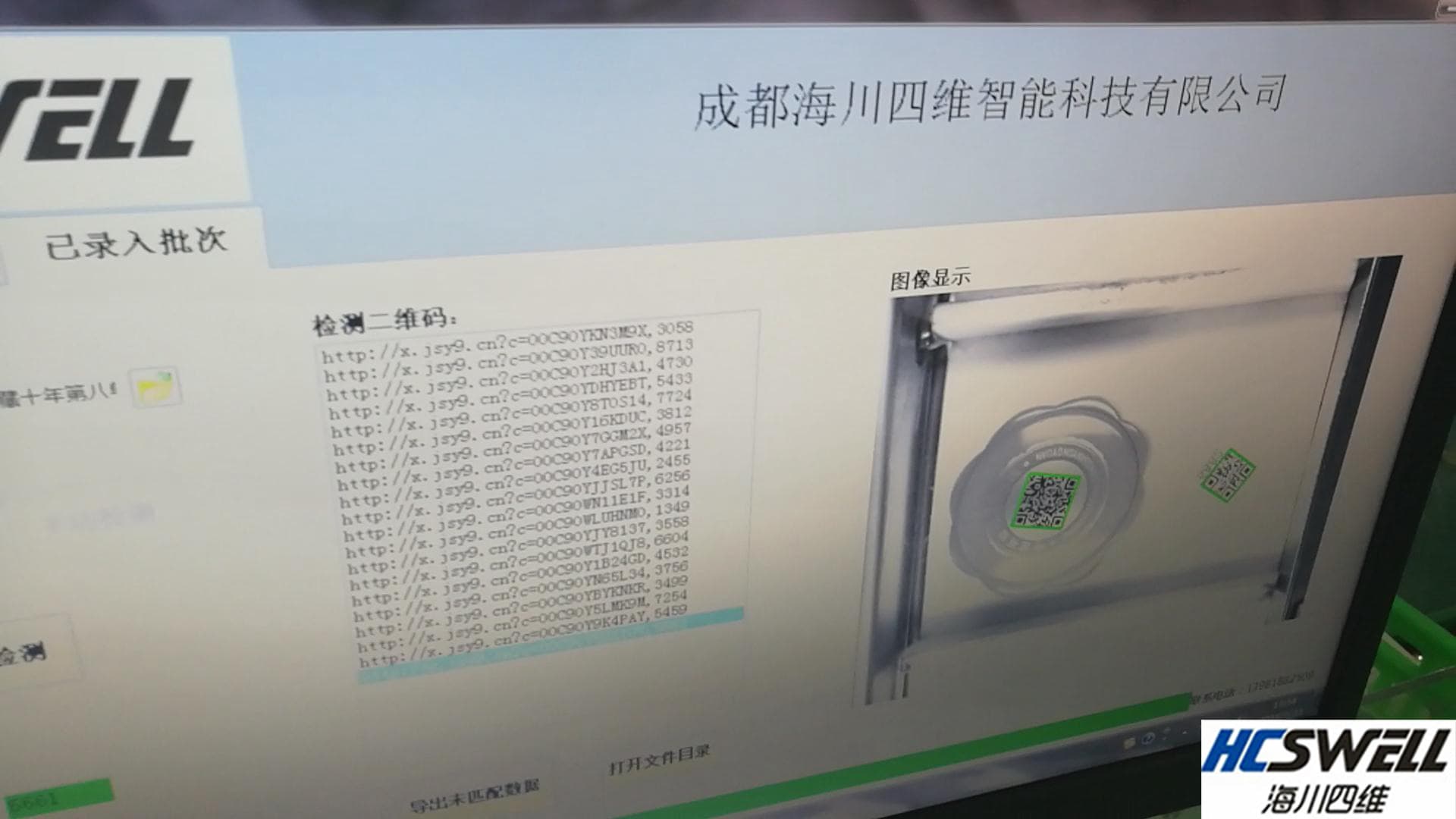
3D拆垛机器人的视觉部分采用成熟的3D工业相机,能够轻松应对不同物体和环境,从而保证高质量的拆垛工作。这种高性能的视觉系统,使得机器人能够精准地感知和识别各种形状、尺寸和材质的货物,为后续的拆垛操作提供了可靠的基础。同时,视觉系统的智能识别与定位功能,也大大提高了机器人处理复杂环境和任务的能力,为智能物流作业带来了全新的可能性。

3、 机械机构
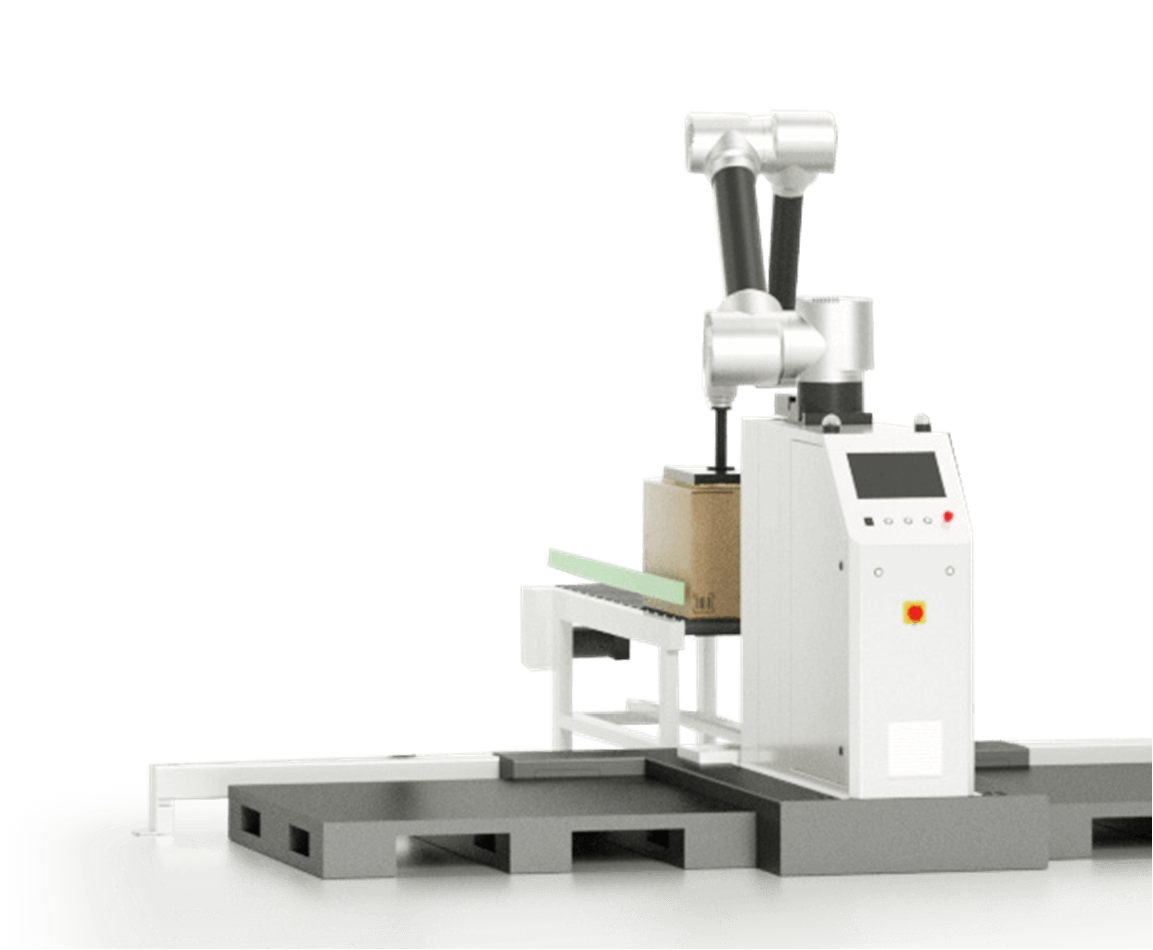
3D拆垛机器人的机械机构可根据客户需求,针对不同的应用场景,由专业的设计人员给出设计方案。这意味着机器人的机械结构可以根据实际情况进行个性化定制,以适应不同的拆垛环境和场景需求。由于物流行业的多样性和复杂性,这种定制化的机械机构设计,使得机器人能够更好地适用于各种不同的拆垛作业,提高了机器人系统的灵活性和适用性。
4、 处理系统
海川四维3D拆垛机器人采用相机+视觉处理系统,可以进行设置,可实现拆垛、码垛、零件定位抓取和路径规划功能。这意味着机器人系统具备了全面的自动化控制和作业功能,能够满足复杂的拆垛作业需求。通过处理系统的强大功能,机器人能够实现高效的拆垛操作,实时调整路径规划,提高作业效率和准确性,为智能物流作业带来更大的便利和效益。
综上所述,3D拆垛机器人凭借着视觉部分的高精度识别能力、机械机构的稳定性和处理系统的智能化管理,实现了高质量的拆垛工作。它能够应对不同物体、不同环境下的拆垛需求,提高了工作效率和准确性,为企业节约了人力成本和时间成本。随着科技的不断进步和应用场景的扩大,海川四维相信3D拆垛机器人将在物流领域发挥越来越重要的作用,助力企业实现更高效、智能的仓储物流管理。
本文揭秘3D拆垛机器人的组成部分(3D拆垛机器人如何实现高质量拆垛):https://www.hcswell.com/industry-news/796.html,海川四维智能科技版权所有,抄袭必究!