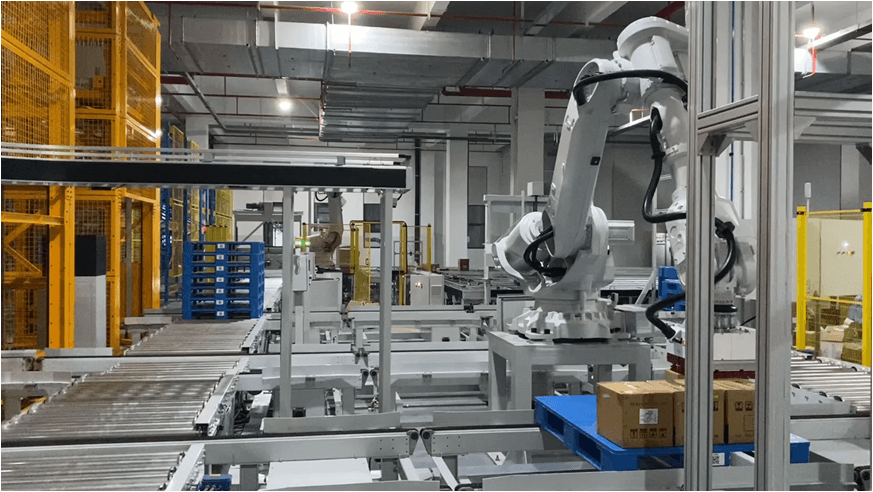
随着人工智能技术的发展,智能机械手臂越来越多地应用于工业生产中。智能机械手臂是现代工业中不可或缺的设备,它由执行机构、驱动机构和控制机构三个部分组成。海川四维将视觉识别、感知技术和学习算法等技术的这些部组合在一起,使得机械手臂能够灵活、高效地完成各种任务。
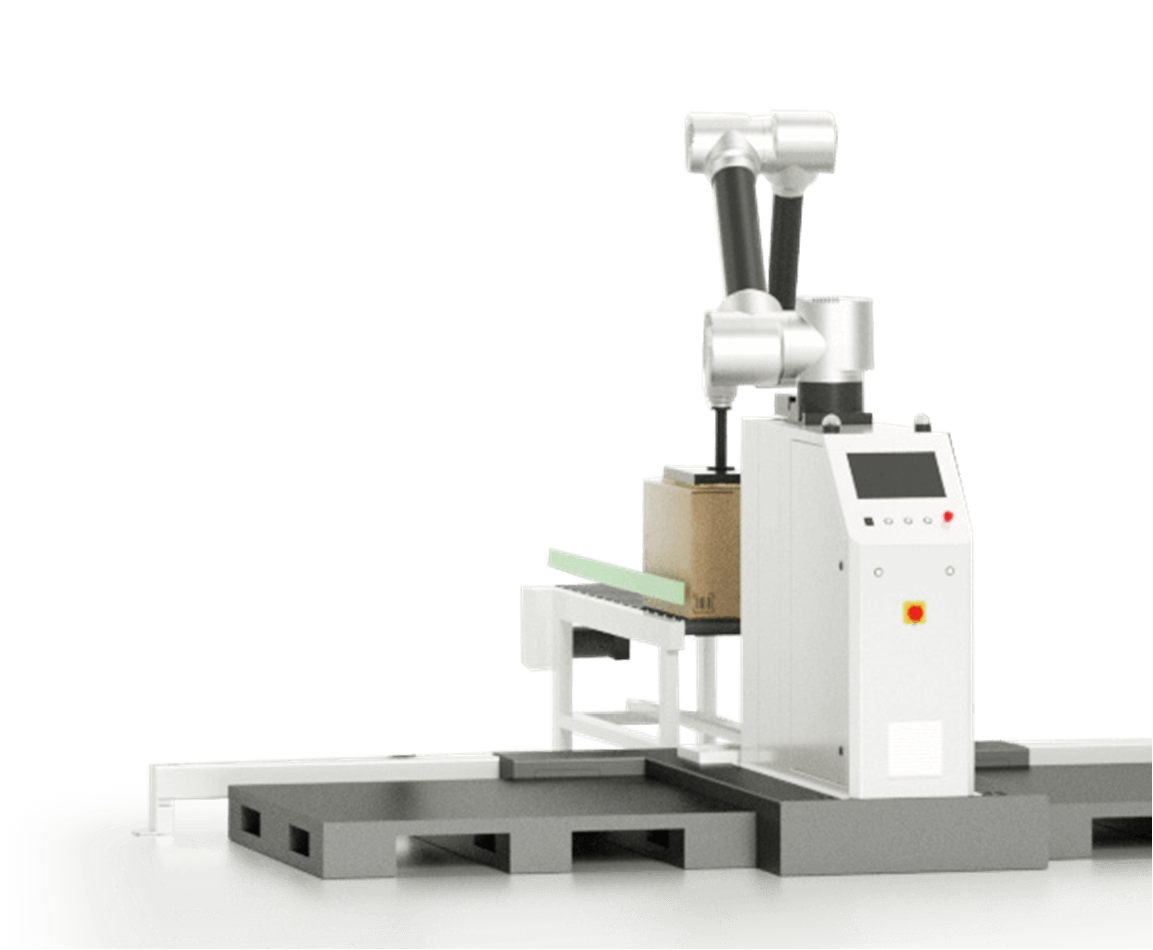
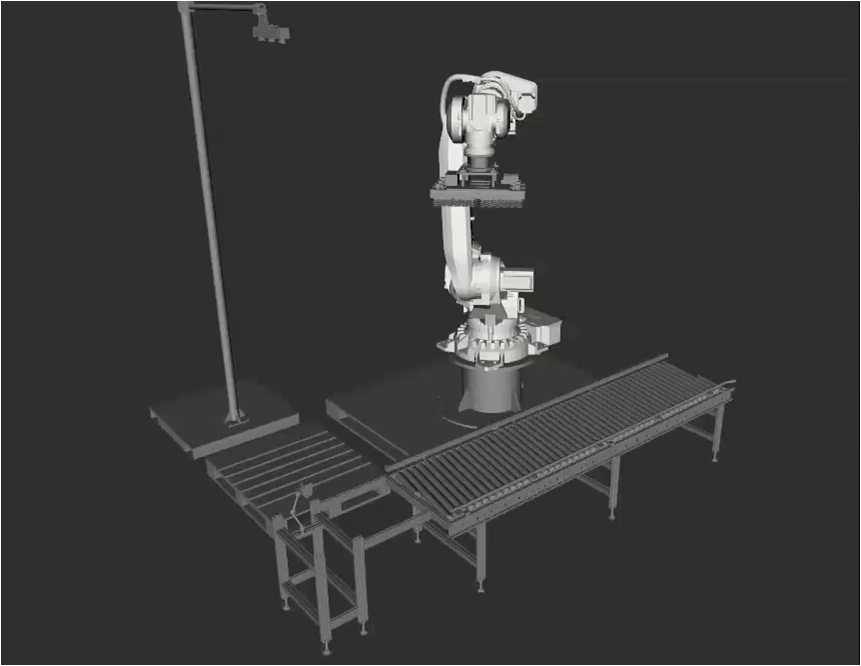
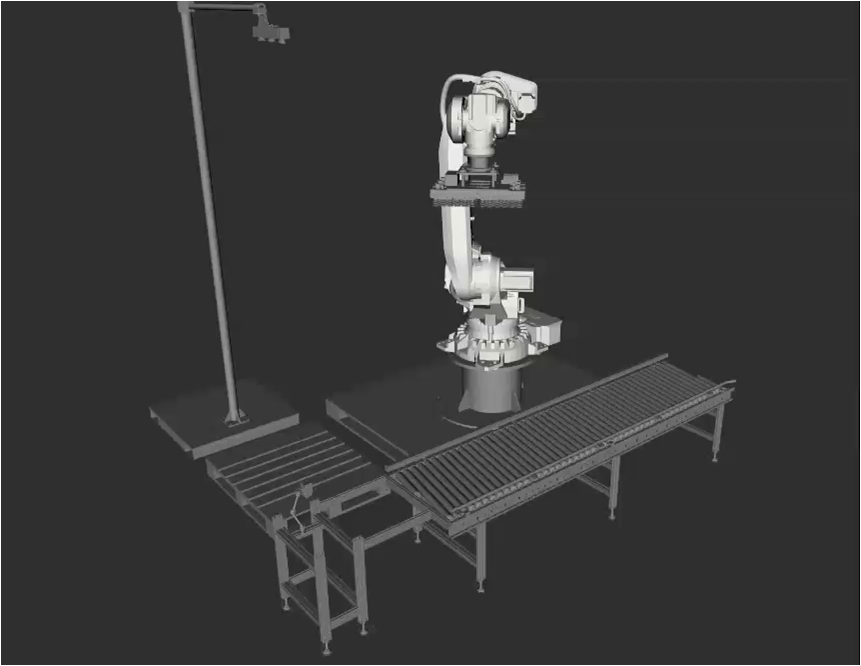
执行机构是智能机械手臂的核心部分,它包括手部、腕部、臂部和手臂等关节。这些关节可以模拟人类手臂的运动,具备抓取、旋转、平移等功能。通过不同形状、材料和结构设计,执行机构能够适应不同的工作环境和操作要求。
驱动机构是智能机械手臂的重要组成部分,它负责提供动力以推动执行机构的运动。根据动力源的不同,驱动机构可分为液压、气动、电动和机械驱动四类。液压驱动机构具有高承载能力和稳定性,适用于重载工作;气动驱动机构响应速度快,适用于速度要求较高的场景;电动驱动机构具有精准控制和高效能耗的特点;机械驱动机构结构简单、成本较低。
在机械手的控制方面,有点动控制和连续控制两种方式。点动控制是指通过按钮或开关进行操作,可以对机械手臂进行逐步控制,适用于一些简单的工作任务。而连续控制则是通过计算机或其他智能设备进行操作,可以实现对机械手臂的实时控制和精准定位,适用于复杂的生产线或精细操作。

综上所述,智能机械手臂由执行机构、驱动机构和控制机构三部分组成,通过它们的协作工作,机械手臂能够完成各种复杂的操作任务。执行机构包括手部、腕部、臂部和手臂等部件,用于抓取、操纵和移动物体。驱动机构提供动力和力矩,可以是液压、气动、电动或机械驱动等形式。控制机构接收指令或传感器信息,将其转化为对执行机构和驱动机构的控制信号,实现机械手臂的精准操作。
智能机械手臂的关键在于其控制系统的智能化和精准化。通过算法和传感技术,机械手臂可以感知和理解环境,做出相应的决策和动作。例如,视觉传感器可以帮助机械手臂识别和定位物体,力传感器可以感知抓取力度,使得机械手臂能够进行精确的抓取和操作。同时,机器学习和人工智能技术的应用也使得机械手臂能够通过学习和优化提高自身的性能和适应能力。
总之,智能机械手臂的构成和控制技术是实现精准操作的关键。随着科技的不断进步,海川四维相信智能机械手臂将在更多领域展现其巨大潜力,并为人们的工作和生活带来更多便利和效益。
本文海川四维码垛机械手臂的构成(智能机械手臂的构成及控制方式):https://www.hcswell.com/industry-news/756.html,海川四维智能科技版权所有,抄袭必究!