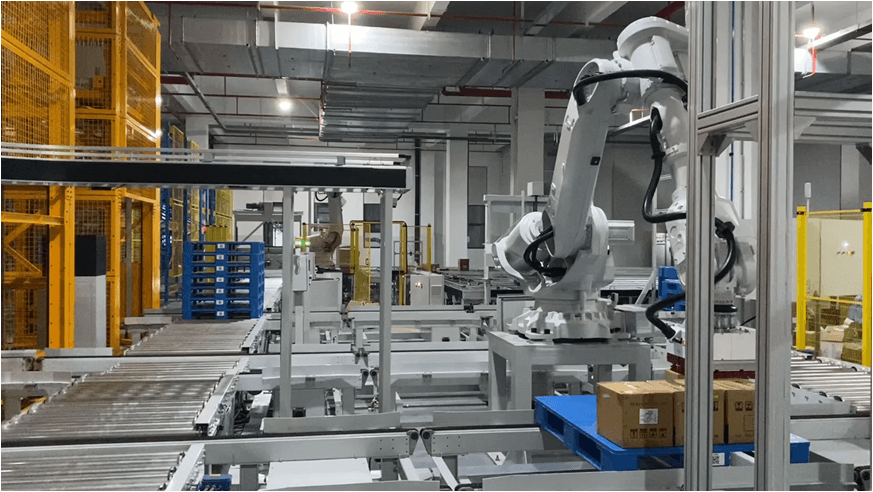
伴随工业生产4.0时代的来临,人工智能应用的逐步成熟期,智能机器人市场的发展即将迎来春季。在其中,AGV的增势迅速,显得格外突显,这些产品五花八门,在汽车产业、家用电器生产制造、电商仓储物流、香烟等行业获得广泛应用。
AGV作为智能物流的核心,已经向着更为智能化系统、智能化方向演化,其导航科技的飞速发展和创新是一个非常非常值得关注的问题。
根据全部智能制造系统的高速发展,市场中较比较常见的导航方法根据技术性大概可以分为三代:第一代是电磁感应和磁导航,第二代是现在行业流行的二维码导航,第三代分成两类,各是根据激光器与视觉上的二种SLAM优化算法导航。

(1)AGV复合机器人静态数据位置计算方式:
当小车第一次进入系统软件,AGV复合机器人的现阶段位置不清楚时,需要进行原始位置计算,根据较为一些已经知道遮光板的己知方向,小车控制板里的导航控制模块计算出小车的位置。
(2)AGV复合机器人在状况下不断动态性位置计算方式
当复位位置计算完成后,小车就开始运动,在的过程当中,小车要进行不断位置计算。下边选用位姿估算矫正法展开分析。这类估算方法的数学课运动模型要以“位姿估算”为核心的。它运用小车现阶段运转的速率、转为的视角、时间间隔等主要参数对下一位置开展估算,计算出相对于前一位置新的位置。
激光导航AVG的特征
激光导航是当前AGV系统内普遍使用的导航方法,依据它导航基本原理,AGV复合机器人在导航区中可自由飞翔并精准定位;在导航范围之内,小车的走动途径可按照实际规定随时随地修改,可充分运用AGV的软性,提高工作效率。有很多系统软件必须在已有的场所环境下开展,这时候,激光导航AGV将自动会显得格外适合。
本文AGV复合机器人在智能物流中的运用:https://www.hcswell.com/industry-news/494.html,海川四维智能科技版权所有,抄袭必究!