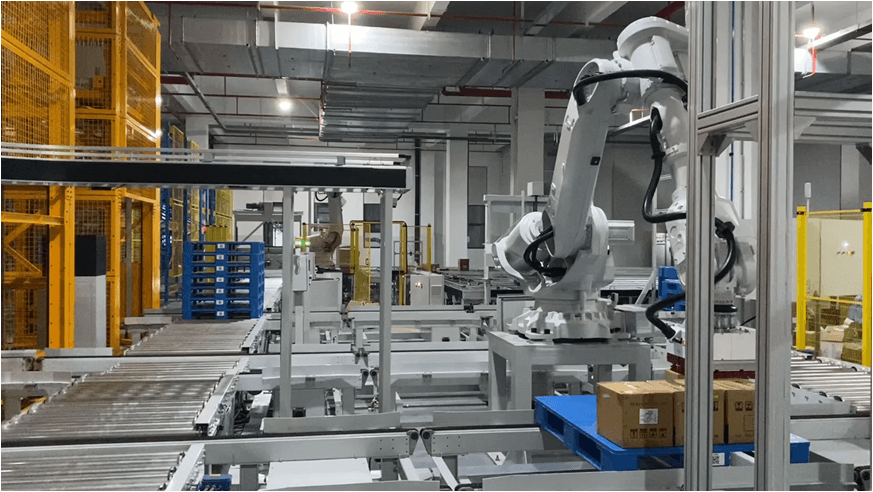
海川码垛机器人执行的多是抓放操作,即机器人从传送带上抓取物料,沿运动路径将其放置在托盘上指定位置的动作循环。故根据机器人在完成码垛作业时其与传送带及托盘的位置关系,综合考虑运动过程障碍物情况,选用“门”字形运动轨迹。注意到机器人末端执行器在完成托盘上不同位置纸箱的码放时,所走轨迹均为“门”字形,仅因纸箱在托盘上位置不同导致轨迹终点坐标不同。

所谓码垛是按照集成单元化思想,将物料按照一定模式堆码成垛,以便使单元化的物垛实现物料的存储、搬运、装卸、运输等物流活动。与传统的人工码垛及龙门式码垛机相比,海川码垛机器人因其生产效率高、占地空间小、动作灵活性大、人工劳动强度低等特点,逐渐被应用到各个领域中。
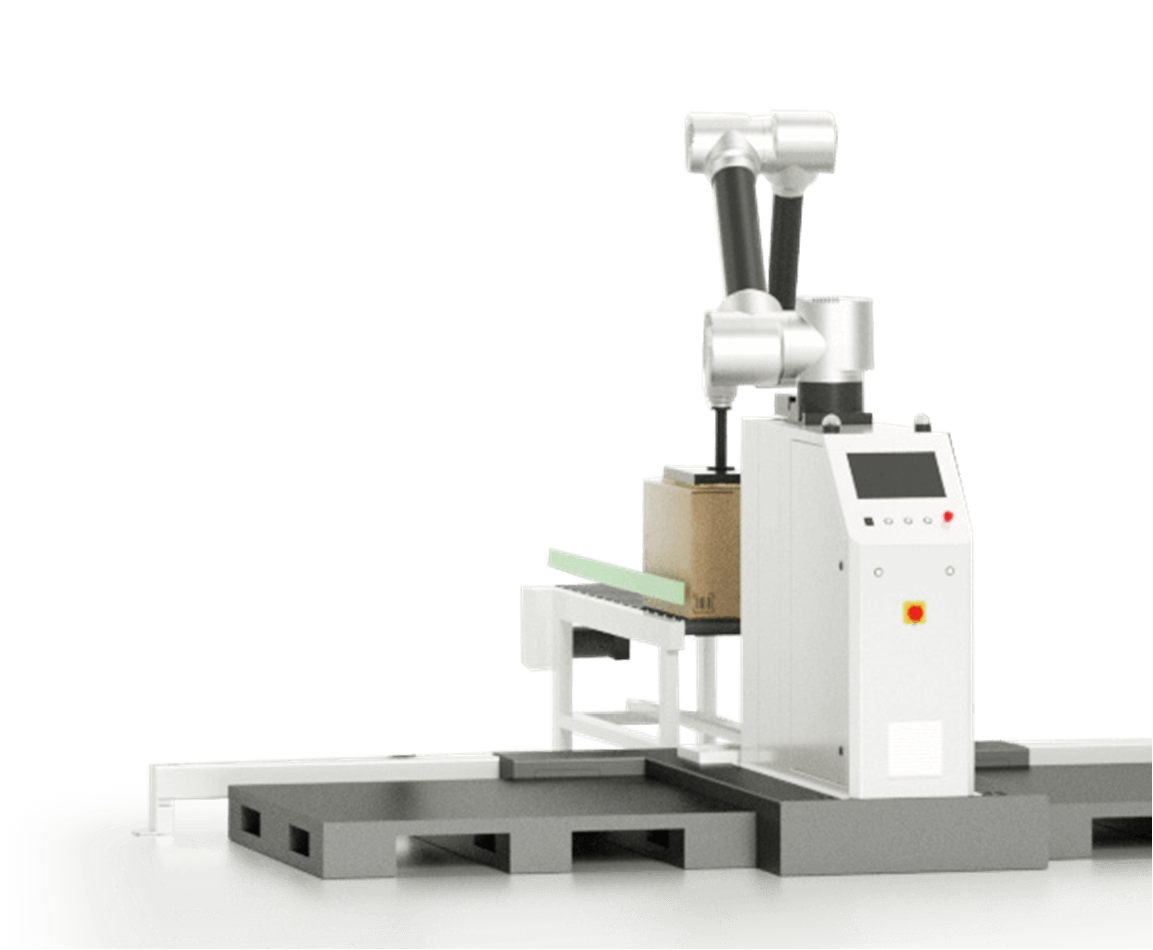
常用的码垛机器人手抓
夹爪式机械手爪:主要用于高速码袋;
夹板式机械手爪:主要适用于箱盒码垛;
真空吸取式机械手爪:主要适用于可吸取的码放物;
混合抓取式机械手爪:主要适用于可吸取的码放物;
混合抓取式机械手爪:适用于几个工位的协作抓放。
在采用码垛机器人的时候,需要考虑一个重要的事情,就是机器人怎样抓住一个产品。真空抓手是最常见的机械臂臂端工具(EOAT)。相对来说,它们价格便宜,易于操作,而且能够有效装载大部分负载物。但是在一些特定的应用中,真空抓手也会遇到问题,例如表面多孔的基质,内容物为液体的软包装,或者表面不平整的包装等等。
码垛机器人分类
根据机械结构的不同, 码垛机器人包括如下三种形式: 笛卡耳式、旋转关节式和龙门起重架式。
①笛卡耳式码垛机器人:主要由四部分组成: 立柱、X向臂、Y向臂和抓手, 以四个自 由度(包括三个移动关节和一个旋转关节)完成对物料的码垛。这种形式的码垛机构造简单,机体刚性较强,可搬重量较大,适用于较重物料的码垛。
②旋转关节式机器人:码垛机绕机身旋转,包括四个旋转关节:腰关节、肩关节、肘关节和腕关节。这种形式的码垛机是通过示教的方式实现编程的,即操作员手持示教盒,控制机器人按规定的动作而运动,于是运动过程便存储在存储器中,以后自动运行时可以再现这一运动过程。这种机器人机身小而动作范围大,可同时进行一个或几个托盘的同时码垛能够灵活机动地对应进行多种产品生产线的工作。
③龙门起重架式:将机器人手臂装在龙门起重架上称为龙门架式码垛机器人,这种码垛机器人具有较大的工作范围,能够抓取较重的物料。
海川码垛机器人广泛用于尼龙袋、纸袋、塑料袋、纸箱、塑料容器、玻璃瓶、PET瓶等各种包装产品的码垛和卸载任务。
本文海川码垛机器人的原理:https://www.hcswell.com/industry-news/191.html,海川四维智能科技版权所有,抄袭必究!