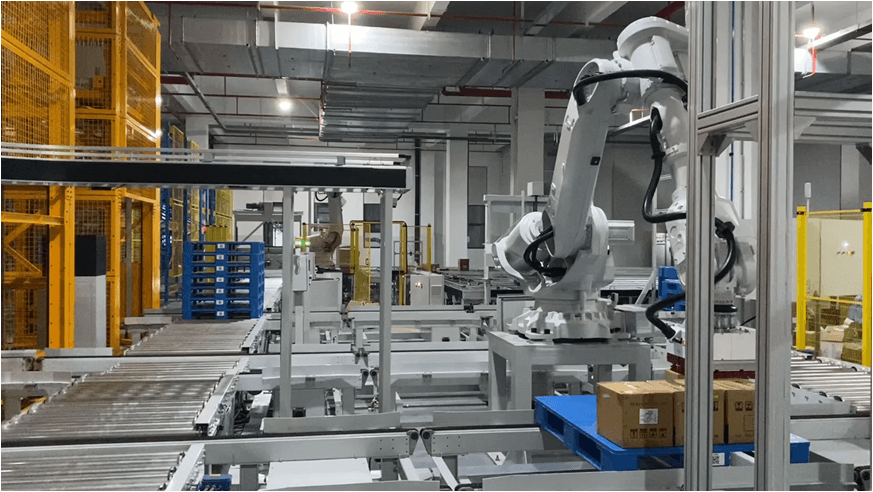
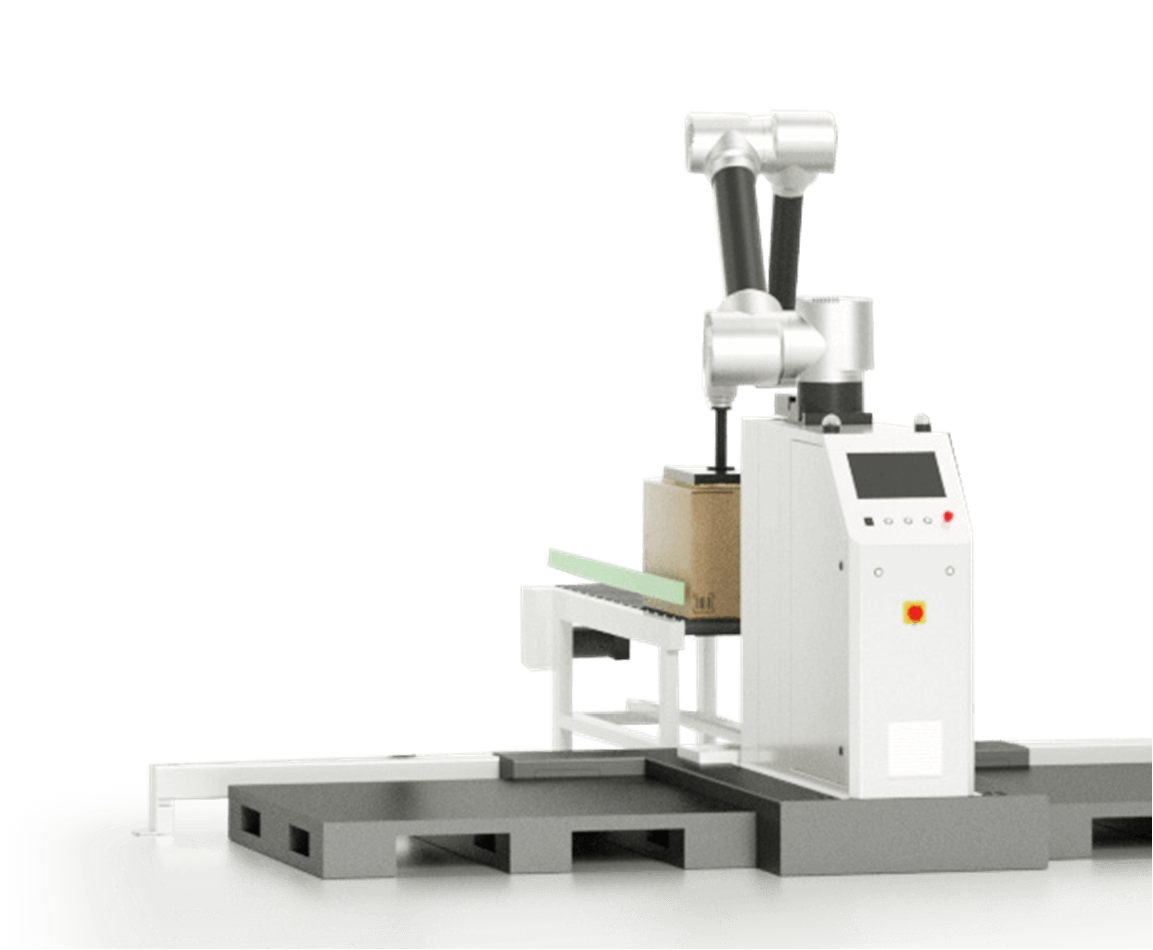
海川AGV复合机器人采用激光导航技术。目前,AGV在物流仓储和柔性生产线中的应用越来越广泛。可能会有这样一个问题,为什么AGV操控机器人可以避开障碍物,选择像人一样绕道而行。

海川AGV复合机器人能自主导航,有避障功能。事实上,AGV搬运机器人智能化的一个重要标志就是自主导航,而完成机器人自主导航的一个根本要求就是避障。接下来,让我们介绍如何正确理解AGV搬运机器人的自动避障。AGV自动避障是指AGV搬运机器人在自动驾驶过程中,根据采集到的障碍物状态信息,感应到阻碍其通过传感器的静态和动态物体时,根据一定的方法有效停止自动避障,最终到达目的地。
智能AGV搬运机器人的安全系数是其设计方案中的一个重要因素。传感器技术在AGV避障中起着非常关键的作用。要完成AGV的常见故障和导航栏,需要根据控制器获取周围环境信息、障碍物大小、形状、位置等信息。当障碍物进入预警类别时,避障控制模块发出语音广播,并可根据系统总线将预警信息的内容发送给自动控制系统的主控制器。自动控制系统主控板接收到预警信息后,向避障控制模块发送响应帧,操作电机减速或停止。目前,AGV搬运机器人的避障根据环境信息的控制水平可分为两类:障碍信息已知、障碍信息部分未知或完全未知。传统的导航避障方法,如视觉图法、网格法和自由空间法,可以在障碍物信息已知的情况下解决避障问题,但当障碍物信息未知或障碍物可移动时,传统的导航方法一般不能很好地处理避障问题,或者基本上不能避障。
在实际应用中,AGV搬运机器人所处的环境大多是动态的、可变的和未知的。为了理解和解决上述问题,人们在计算机和人工智能领域引入了一些算法。同时,由于处理器计算能力的进步和传感器技术的发展,在AGV搬运机器人平台上很容易停止一些复杂算法的操作,从而产生了一系列智能避障方法。目前,避障导航的必要条件是环境感知。在未知或局部未知的环境中,避障需要通过传感器获取周围环境信息,包括障碍物的大小、形状和位置。因此,传感器技术在AGV搬运机器人的避障中起着非常重要的作用。AGV自动避障中使用的传感器主要有超声波传感器、视觉传感器、红外传感器、激光传感器等,这些方法各有优缺点。
例如,三角测距的红外传感器方法成本低,但检测不可靠,无法有效检测黑色目标;超声波传感器可以有效地检测玻璃等物体,但声波的可控性较差,容易引起误报。同时,无法解决不同超声波模块之间的串扰问题;激光传感器具有良好的可控性,但对玻璃等透明物体的检测仍受到光束物理特性的限制,无法有效检测所有物体;视觉模式成本较高,现阶段技术不完善,存在盲区检测问题。海川AGV复合机器人通过配套的选深度识别传感器,对障碍物进⾏准确识别通过配套的选深度识别传感器,对障碍物能进⾏准确识别。
本文海川AGV复合机器人自动避障:https://www.hcswell.com/industry-news/171.html,海川四维智能科技版权所有,抄袭必究!