随着工业自动化的不断发展,机器人的应用也越来越广泛。其中,协作移动码垛机器人成为了许多企业智能化转型的关键工具。其工作原理和技术特点得到了越来越多的重视和研究。
一、工作原理
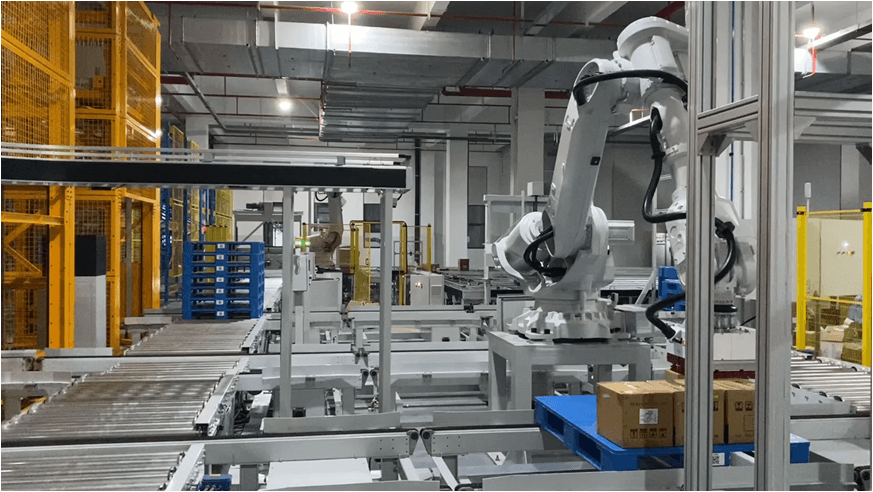
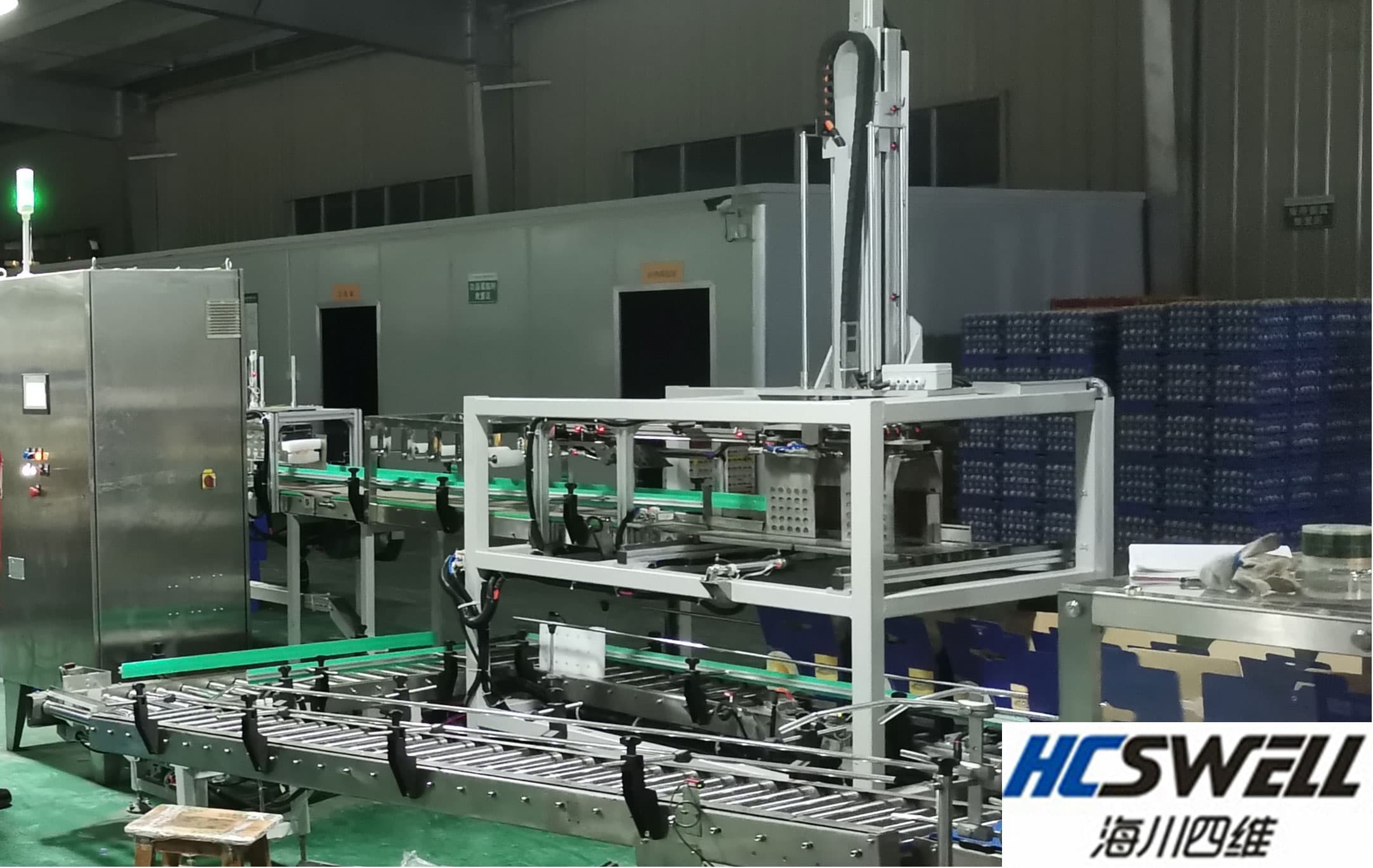
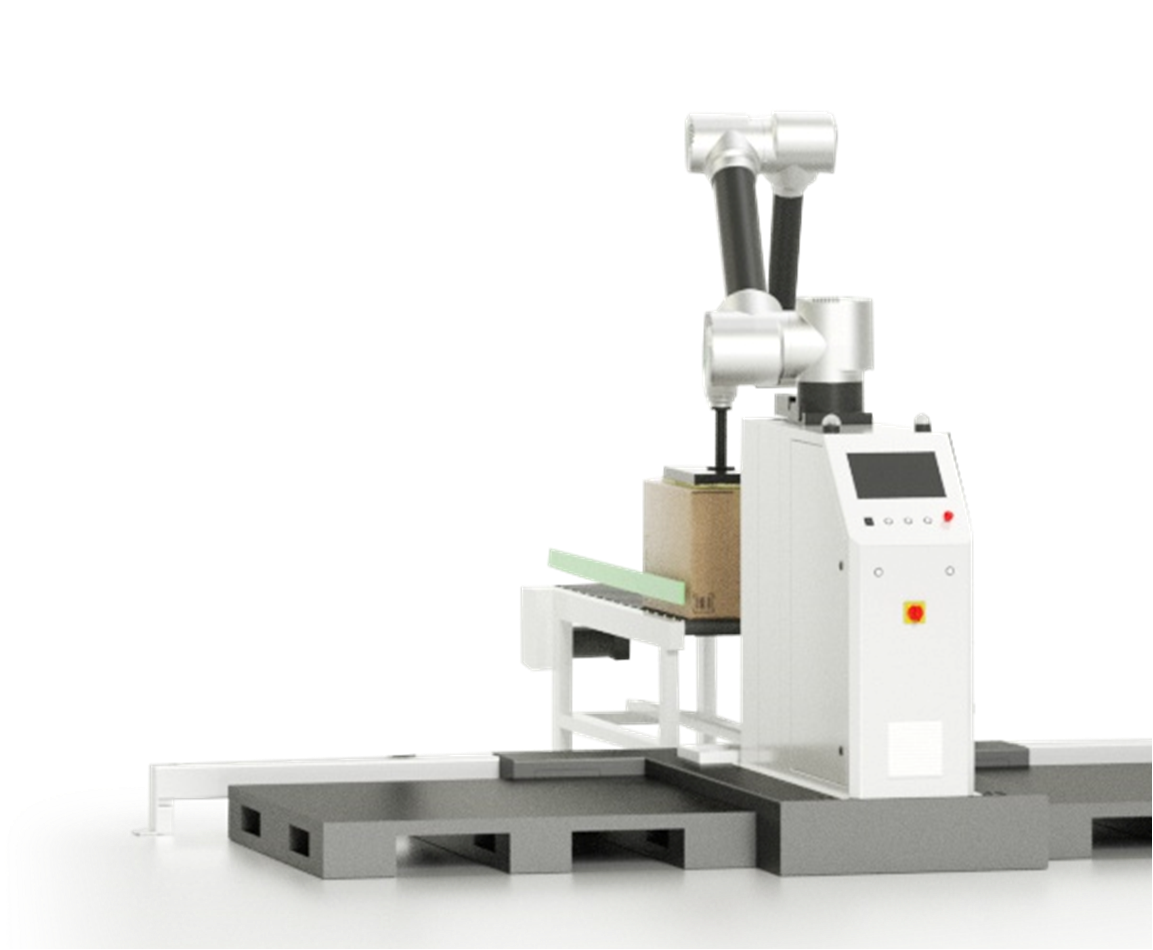
协作移动码垛机器人的工作原理是通过机器人控制系统、机械运动系统和视觉识别系统等多种技术手段,实现对物品进行自动抓取、搬移、码垛等操作。机器人可以通过与人类的协作,实现更高效、更安全、更精确的工作。同时,机器人具有自主学习和自适应的能力,可以根据不同的物品特性和工作环境,自动调整工作方式和路径,提高工作效率和稳定性。
二、具体地说,协作移动码垛机器人的工作流程如下:
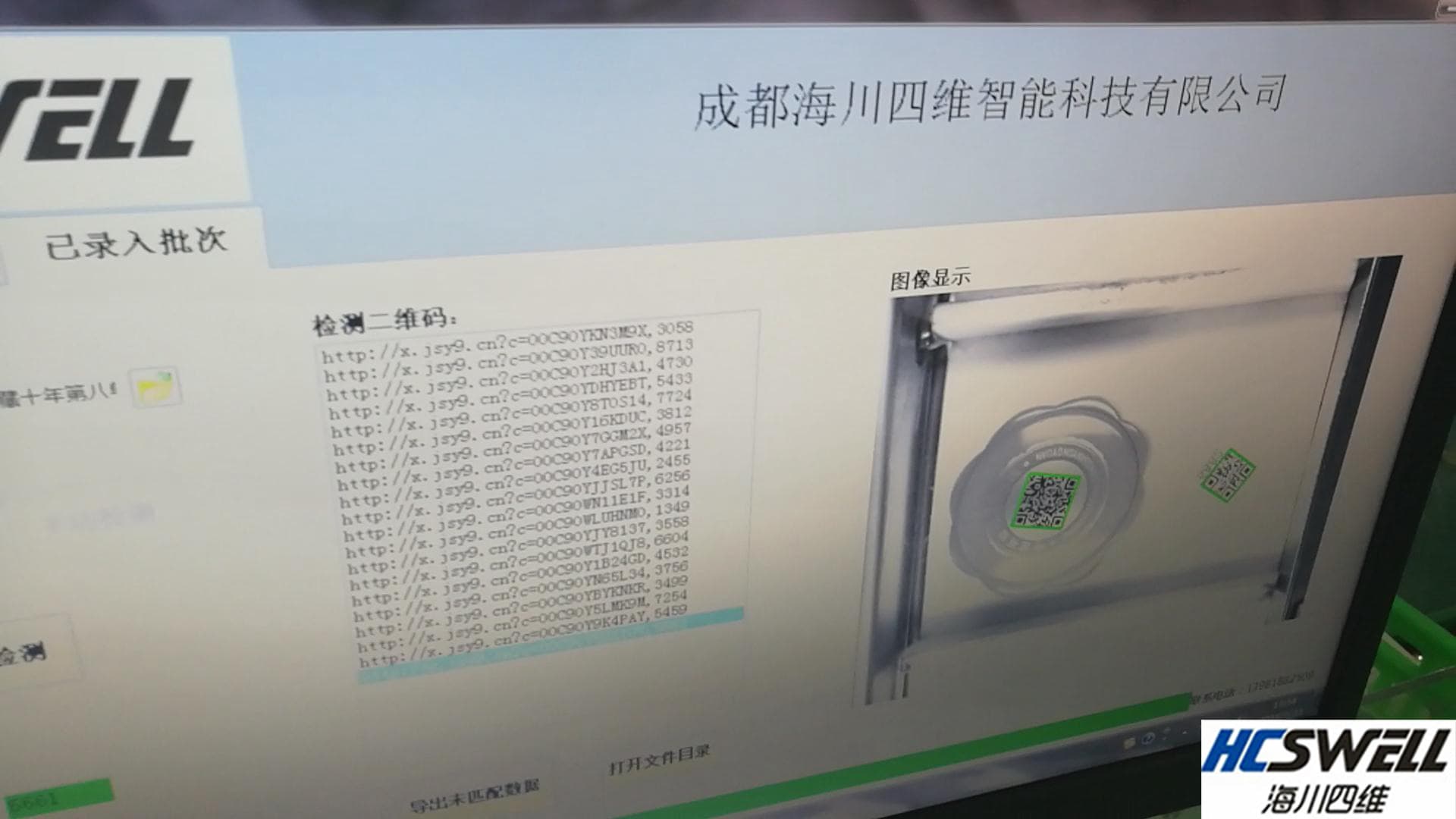
1、机器人通过视觉识别等技术手段对待处理物品进行扫描和识别,根据扫描结果,计算出货物的位置、形状和尺寸等信息。
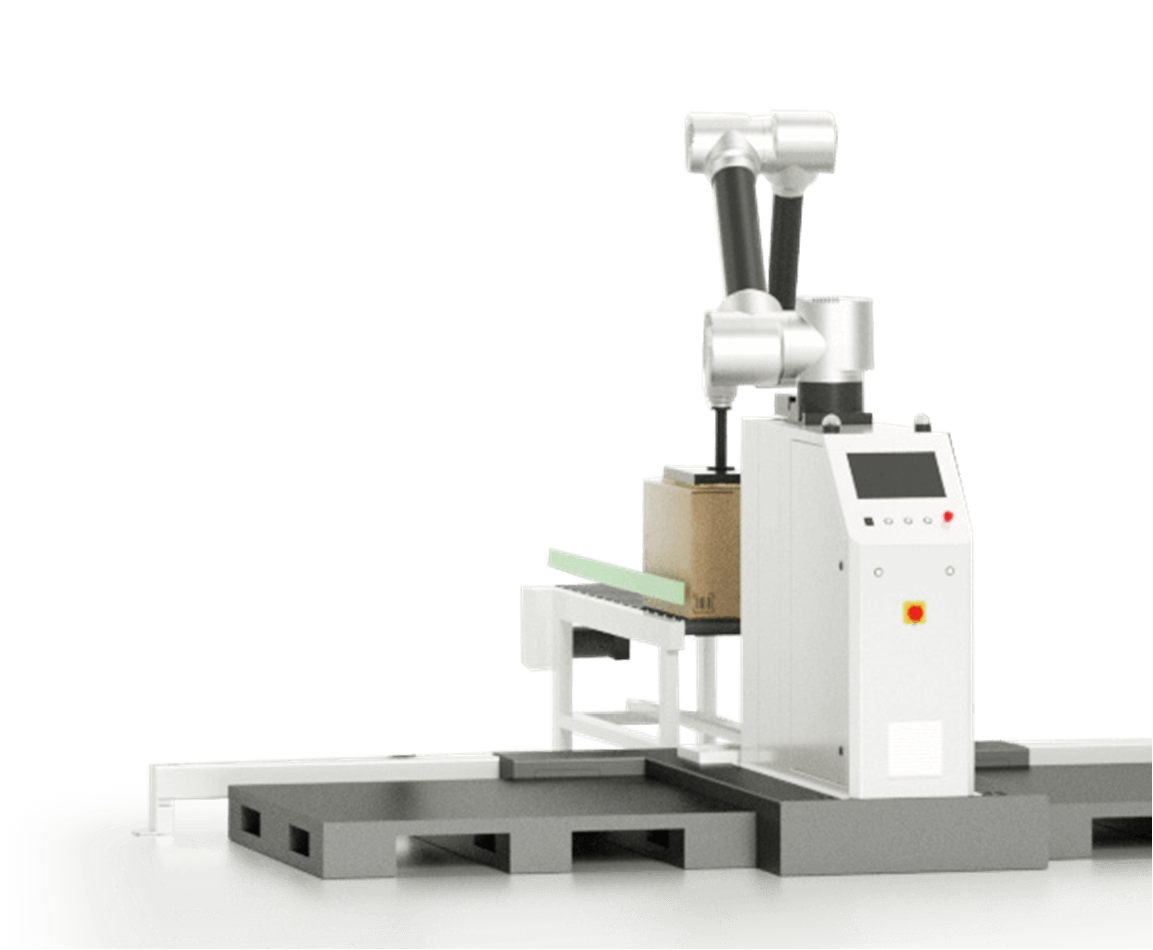
2、机器人根据预设的程序和路径,自动调整姿态和位置,实现自动抓取和搬移。
3、机器人将物品按照预设的规则和要求进行码垛处理。
4、机器人通过自主学习和自适应技术,不断优化工作流程和路径,提高工作效率和稳定性。
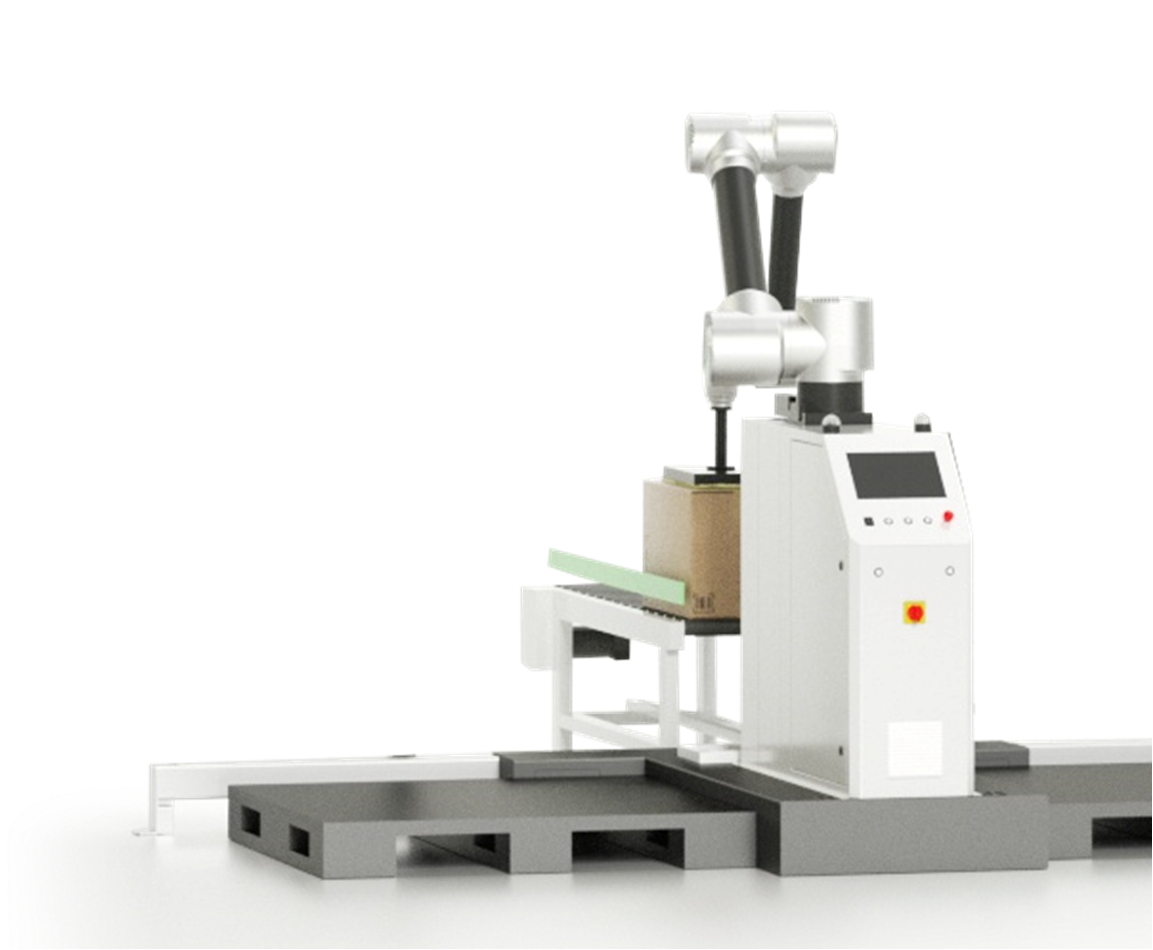
海川四维协作移动码垛机器人整个工作流程通过机器人控制系统的管理和监控,实现对机器人进行实时管理和监控,确保码垛机器人的安全性和稳定性。
")
三、协作移动码垛机器人的技术特点主要体现在以下几个方面:
1、是具有高精度的视觉识别技术,可以对不同形状、不同大小的物品进行准确识别和抓取。
2、是具备自主学习和自适应的能力,可以根据不同的物品特性和工作环境,自动调整工作方式和路径,提高工作效率和稳定性。
3、是具有协作能力,可以与人类进行无缝协作,实现更高效、更安全的工作。
4、是具备高效的码垛能力,可以根据预设的规则和要求,对待处理物品进行自动化的码垛操作,实现高速度、高效率的码垛工作。同时,码垛机器人还具有高精度、稳定性强的特点,可以确保码垛的准确性和稳定性,减少码垛过程中出现的错误和损失,提高工作质量和效率。
总的来说,协作移动码垛机器人是一种充满前瞻性和创新性的自动化设备,通过其高精度的视觉识别技术、自主学习和自适应的能力、高效的码垛能力以及与人类的协作能力,为物流和仓储领域提供了全新的解决方案。随着科技的不断发展和应用,码垛机器人的性能和功能将不断升级和完善,为生产和物流行业的高效发展提供更加可靠和智能的解决方案。
本文 协作移动码垛机器人的工作原理和技术特点分析(协作机器人工作原理):https://www.hcswell.com/industry-news/683.html,海川四维智能科技版权所有,抄袭必究!