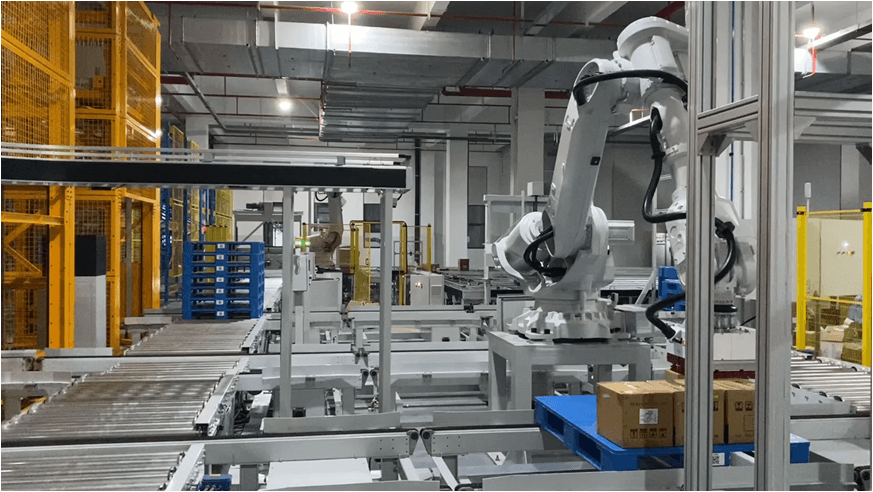
海川四维致力于研发和创新机器人技术应用,解决机器人在气瓶缠绕机上下料中的技术难点。气瓶缠绕机上下料机器人是现代工业生产中不可或缺的重要设备。然而,这一技术在实现过程中面临着一系列的技术难点和挑战。本文将介绍一些关键的技术难点,如何避免碰撞和如何精准抓取气瓶,并讨论海川四维在气瓶缠绕机上下料机器人中创新实践的应用和贡献。
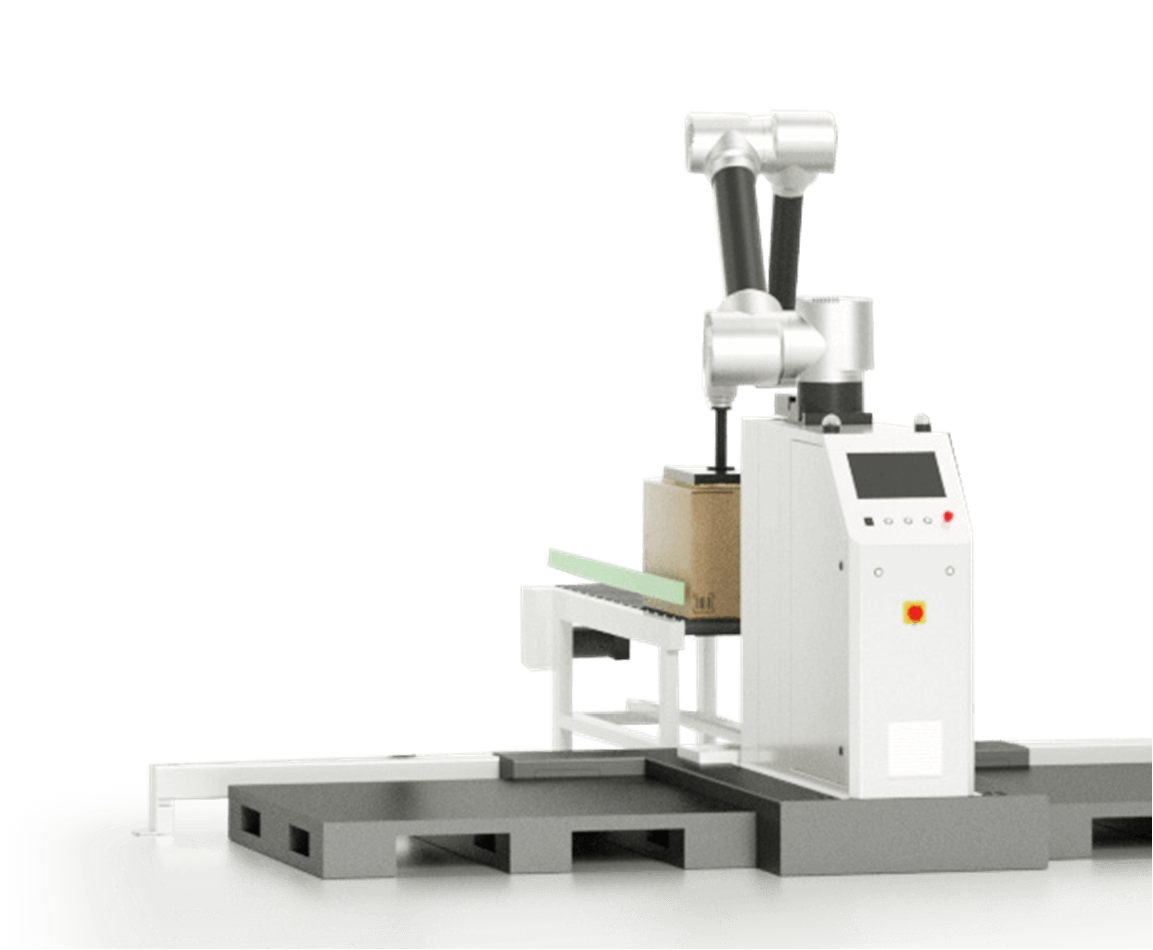
首先,精准抓取气瓶是气瓶缠绕机上下料机器人的重要技术难点之一。由于气瓶形状不规则,重量较大,机器人需要具备高精度的抓取能力。海川四维开发了一种基于深度学习的气瓶抓取系统,该系统能够分析气瓶的形态和尺寸,并正确地掌握抓取位置和方式,实现精准抓取。并通过合理的抓取策略,确保机器人能够稳定、精准地抓取气瓶,还大大减少了人工干预,节省了生产时间和成本。

其次,避免碰撞是另一个关键的技术难点。在气瓶缠绕机的操作过程中,机器人需要与其他设备和工件进行协同操作,避免碰撞和意外损坏。对于气瓶缠绕机上下料机器人来说,机器人需要在繁忙的生产线环境中移动,并避免与其他机器人或运输装置发生碰撞。为了解决这个问题,海川四维使用了高精度激光跟踪系统和多传感器环境感知技术。这些技术使机器人能够精确地检测到周围的环境,并根据情况做出相应的移动和动作决策,确保安全、高效地完成任务。
此外,气瓶缠绕机上下料机器人还需要具备高速、高精度的运动控制能力。海川四维通过优化机器人的动力学模型和控制算法,实现了快速、平稳的运动,提高了机器人的工作效率和精度。
总之,海川四维致力于解决气瓶缠绕机上下料机器人的技术难点,为客户提供可靠的解决方案。通过精准抓取气瓶、避免碰撞和高速运动控制等关键技术的突破,海川四维为工业生产提供了高效、智能的自动化解决方案。
本文海川四维探索气瓶缠绕机上下料机器人的技术难点(气瓶缠绕机上下料机器人实现智能化生产):https://www.hcswell.com/industry-news/715.html,海川四维智能科技版权所有,抄袭必究!