依据构造区划
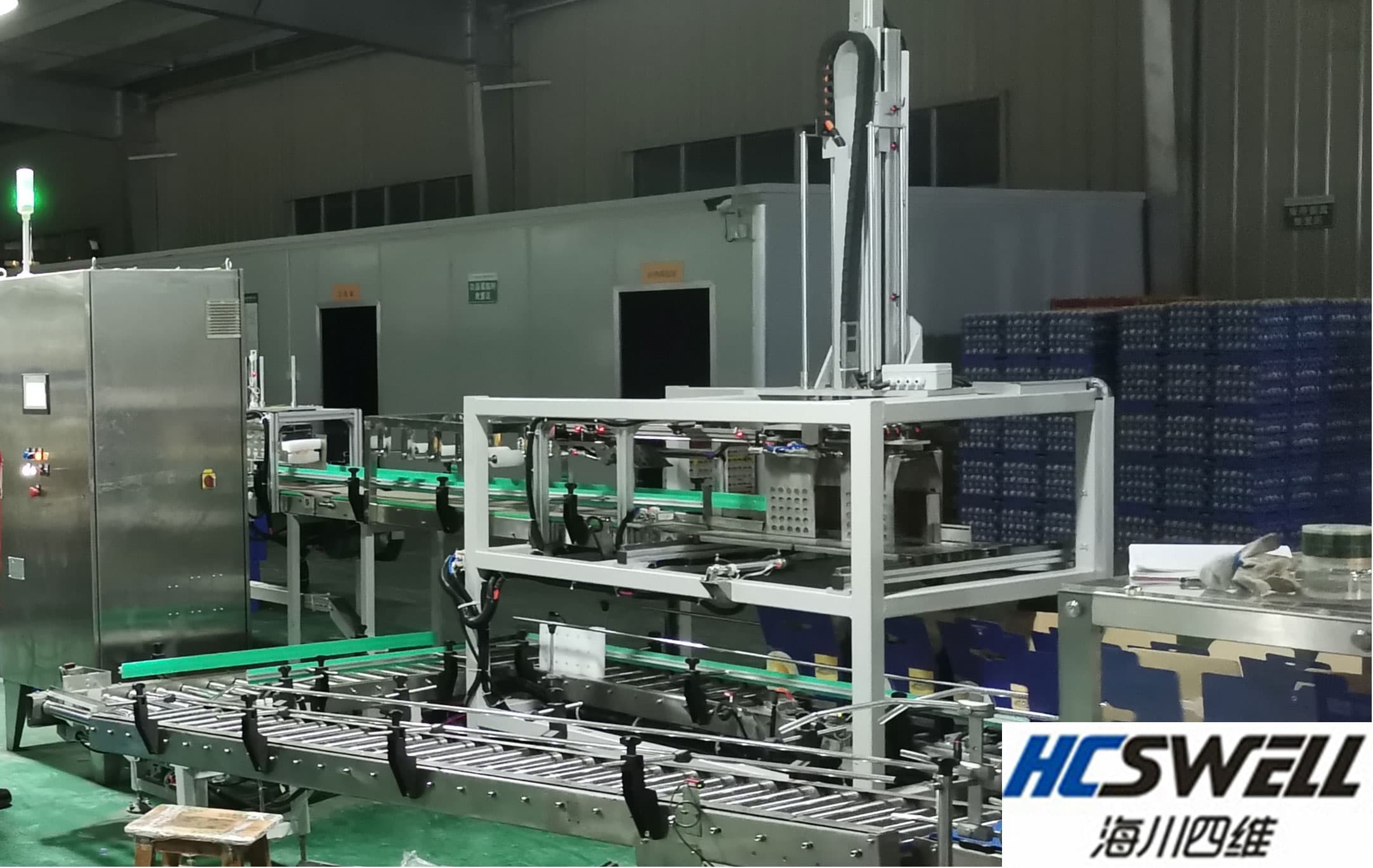
依据机械结构的差异,机器人码垛机包含如下所示三种方式:笛卡耳式、旋转关节式或吊装平台式。
①笛卡耳式机器人码垛机:主要是由四组成:立杆、X向臂、Y向臂和着力点,以四个可玩性(包含三个移动关节和一个旋转关节)实现对物料的码垛。这样的方式的码垛机结构简易,人体刚性很强,可搬净重比较大,适用偏重物料的码垛。
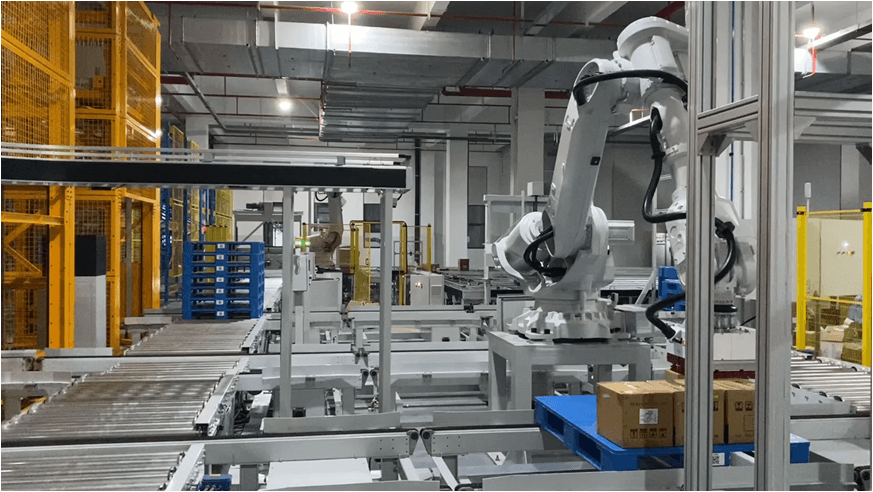
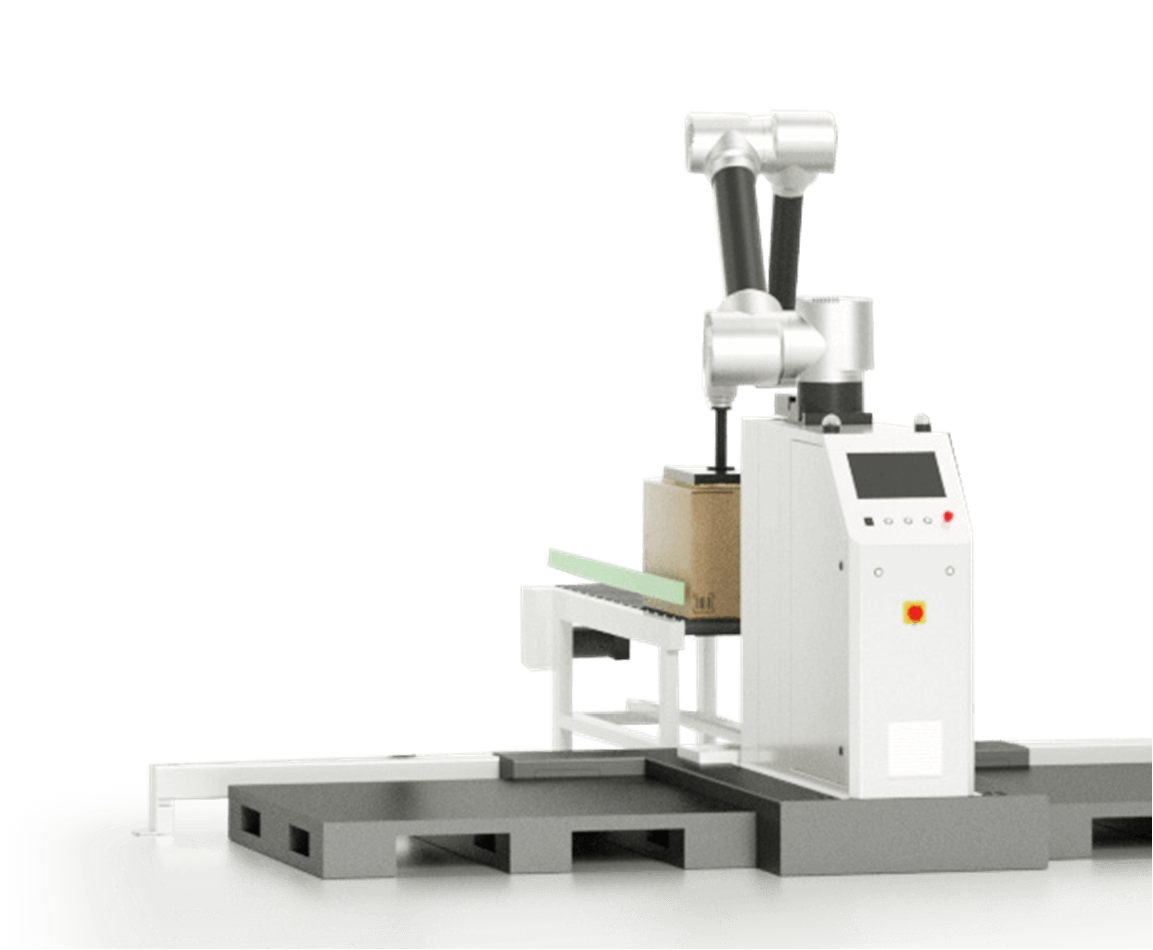
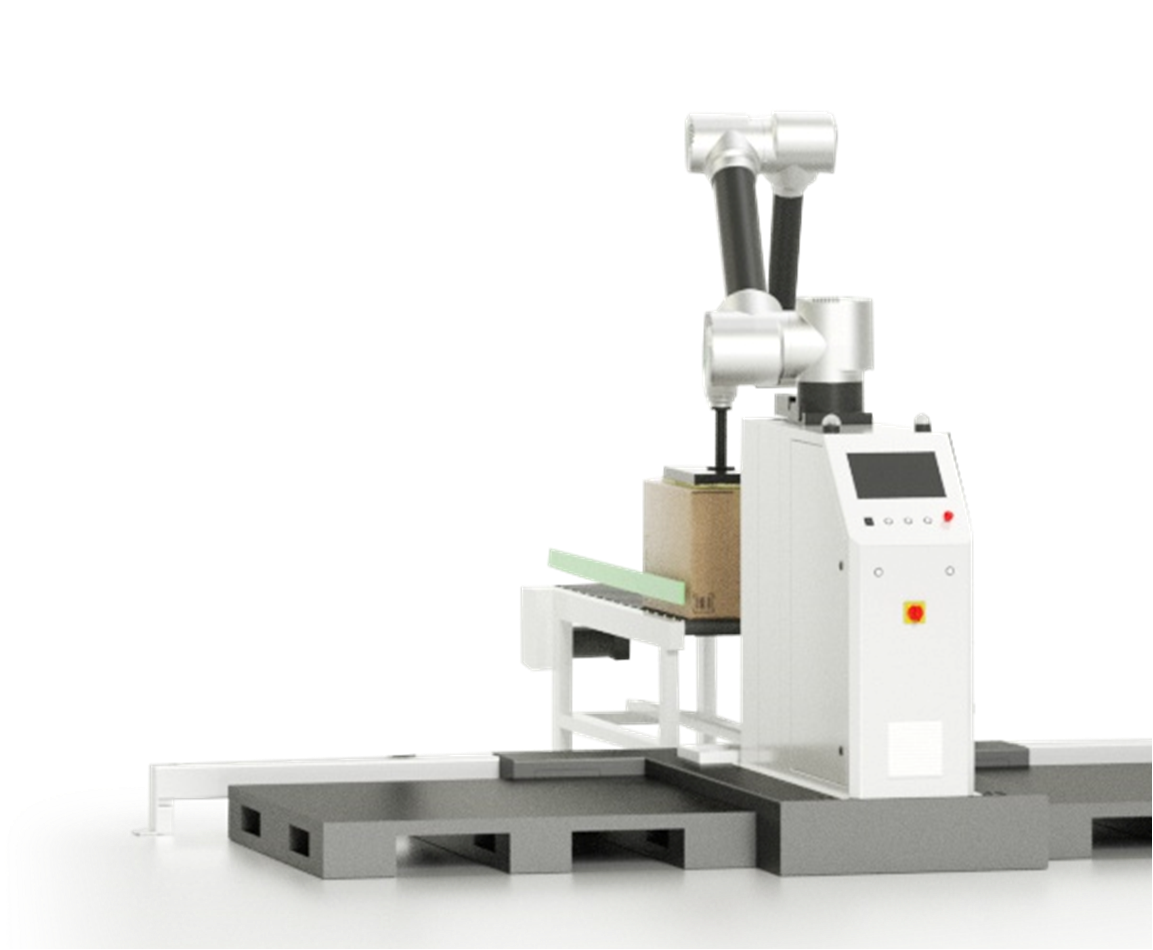
②旋转关节式机器人:码垛机绕整体机身转动,包含四个旋转关节:腰关节、肩关节、肘关节和腕关节。这样的方式的码垛机是由步态分析的形式完成程序编写的,即操作工手执示教盒,操纵机器人按照规定姿势而健身运动,因此运动时便储存在存储芯片中,之后自启动的时候可以重现这一运动时。这类机器人整体机身小又姿势范围广,可以同时进行一个或多个托盘的与此同时码垛可以机动灵活地相匹配开展多种产品生产流水线工作。
③吊装平台式:将机器人胳膊装到吊装架子上称之为架式机器人码垛机,这类机器人码垛机具备比较大的工作范围,可以爬取比较重的物料。

依据堆积规定区划
①单面机器人码垛机
单面构造的机器人码垛机还是比较最基本的,主要依靠输送带把物料输送来,等抵达转向机构时,能够按照相关规定方向调整一下,提前准备完成后,可以进到层输组织上。只需在这个地方将产品按设置的顺序排列开展密切的排序就行了,然后通过输送辊把排序好产品移交至下一个工序,那样机器人码垛机的堆垛工作算实现了。
②双层机器人码垛机
有单面对应的一定有双层,肯定比单面机器人码垛机繁杂。大家可以看到双层机器人码垛机的托送板要在输送带下边的,还是能够开展上下一定的。设备在开展堆垛时,物料会到整齐地排序在托送板里,再将托送板设在载左极限地方。当输送带输送的物料被隔板遮挡时,恰好排成一行。随后托送板偏移,再像上面的流程一样物料又排列成一行。依此类推,物料每多一层,机器人码垛机的升降平台高度就会下降一层,直至将物料堆到一定相对高度后终止。
③排序机器人码垛机
这类机器人码垛机是把物料排一排排之后进行输送的,推板会把输送的物料放进骨料台子上。之后往左边移动,从下向上推,将三层物料堆垛在一起。在这过程中,会出现斜坡设备确保流程的圆满完成,并且骨料台特殊性还会有利于机器人码垛机进行堆垛。这几点只是常见的机器人码垛机。
本文机器人码垛机分类:https://www.hcswell.com/industry-news/583.html,海川四维智能科技版权所有,抄袭必究!