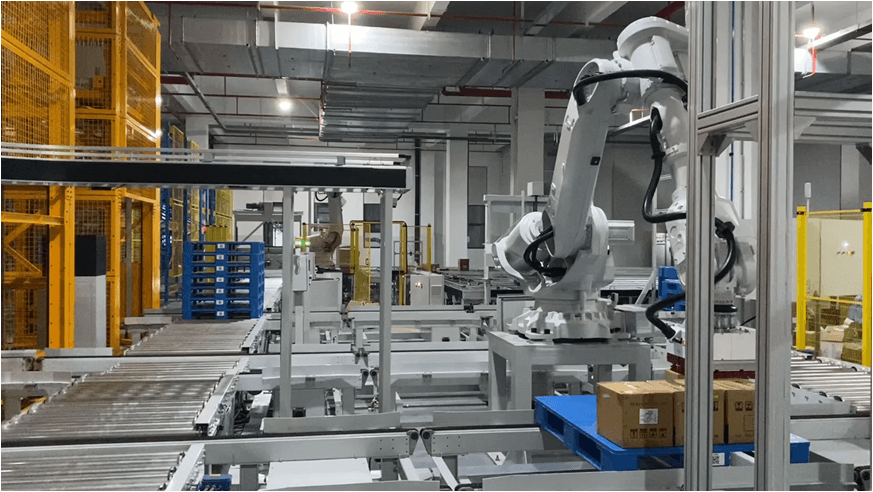
早期拆垛机器人要是通过人工干预去完成机器人抓取,只是针对单一商品的卸载掉,且规定货品依照固定不动排列顺序,机器人不具备感知能力,没法对外界的转变发出信号。但是,多品项原材料拆垛全面的待卸载掉物体规格变化多端,且码放不整齐,因此规定机器人具有实时自然环境感知能力以正确引导抓取姿势。
ei")
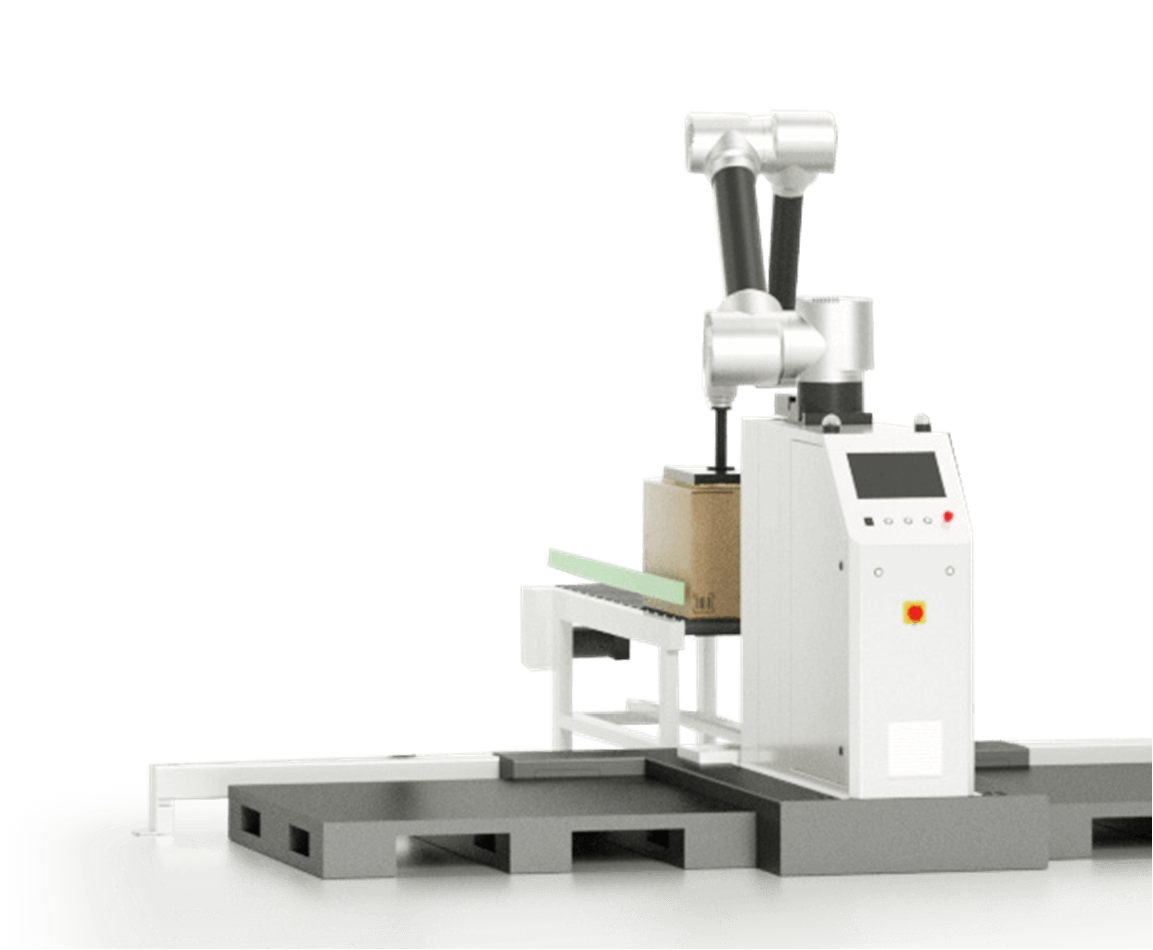
3D拆垛机器人的抓取方式
第一步处理“抓哪一个”问题。此问题的目标是在诸多抓取目标中选定一个理想的抓取目标,通常需要根据实际需要来衡量。全面地,能够结合实际情况量化分析一些对抓取分辨影响很大指标值,再对这种指标值开展优先生产调度。
第二步处理“怎么抓”问题。大家能选根据力学分析的形式分析算出抓取的位姿,还可以通过学习方法先向物体进行筛选,然后根据归类挑选抓取点,然后直接重归出抓取位姿。
抓取位姿测算运用输出目标物体位置状态信息内容进行计算机器人的抓取位姿。因为在多品项原材料拆垛系统软件中常同时存在好几个可抓取目标,因而处理“抓哪一个”和“怎么抓”几个问题。
本文3D拆垛机器人的抓取方式是怎么样的呢?:https://www.hcswell.com/industry-news/435.html,海川四维智能科技版权所有,抄袭必究!