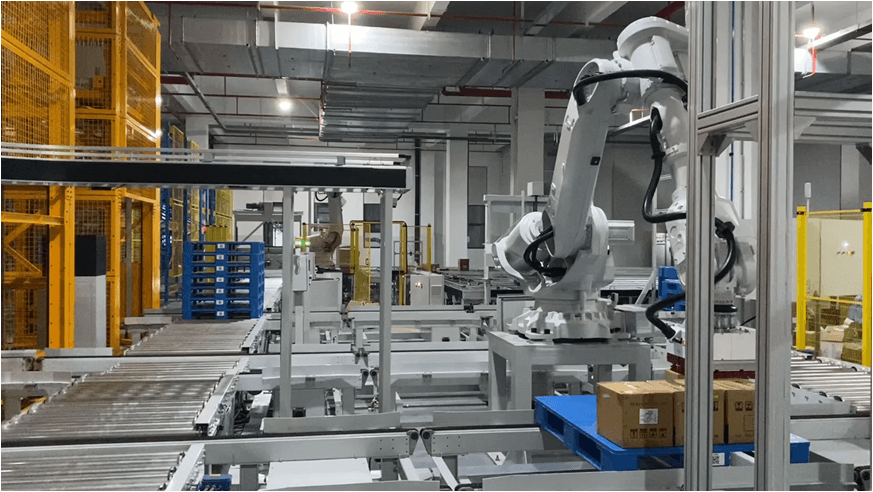
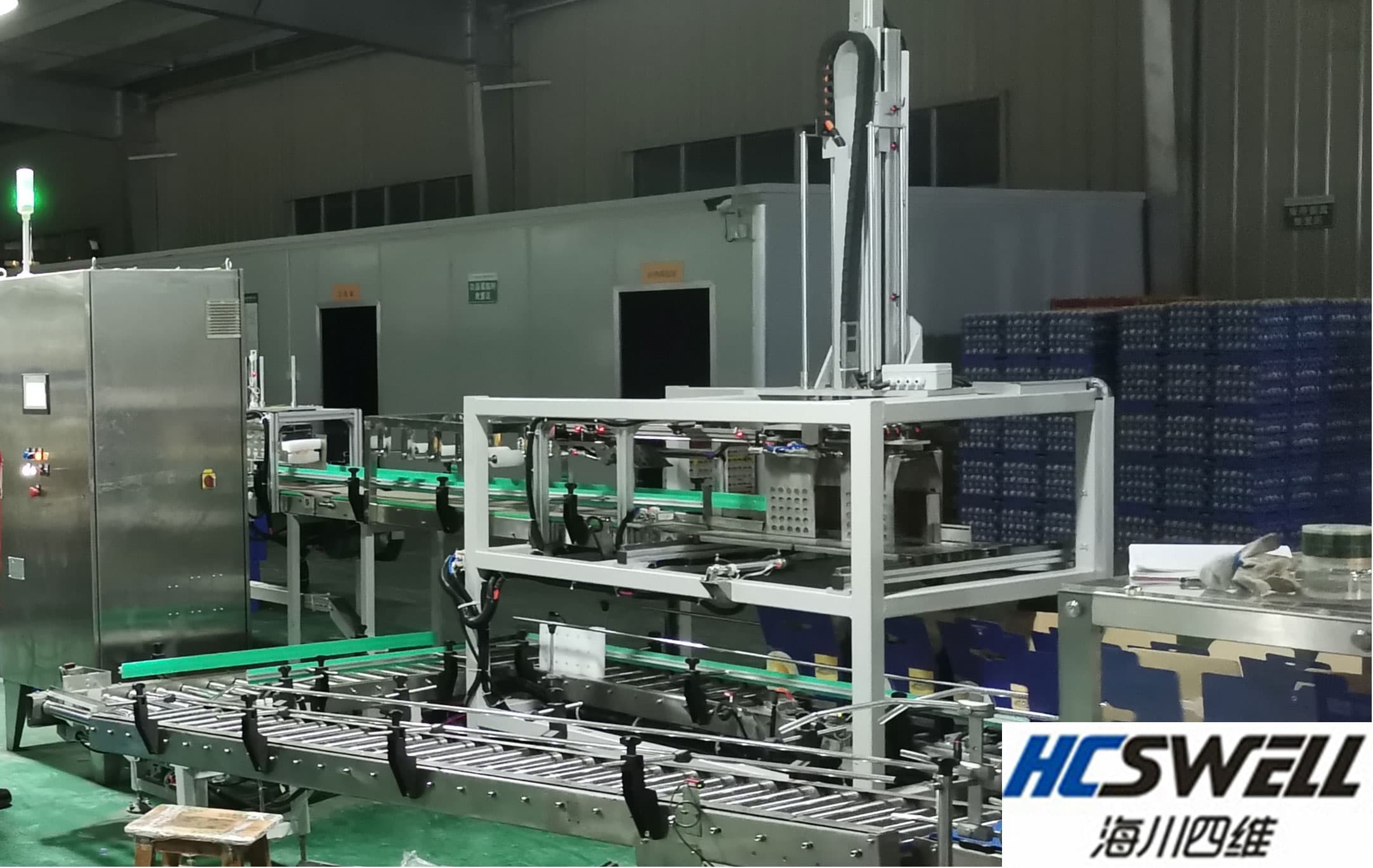
海川码垛机器人抓手,又称终端执行器、夹具和机械抓手,是码垛机器人的重要组成部分。智能机器人抓手夹具的设计一般采用图像系统来识别工件的尺寸,并使用伺服电机来调整夹板之间的距离。整体包括主框架、气缸、两个夹板和伺服电机。夹板用于夹紧工件,其特点是图像控制系统和调整夹具距离的机构。图像控制系统识别工件的尺寸,并控制伺服电机。调整夹板距离的机构由气缸、两个齿传动杆、两个活动板和齿轮组成。齿轮与两个齿传动杆啮合,气缸连接其中一个活动板。齿传动杆的一端通过直线轴承与活动板连接,另一端固定在另一个活动板上,活动板与两个夹板连接。

目前,人工码垛的形式和运输不仅劳动密度高、生产节奏慢、成本高,而且功能单一,仅适用于单个或多个材料的码垛。对于材料的包装材料,如隔板、顶板或堆垛板,需要设置夹具进行运输或手动搬运,这大大提高了成本和运营成本,因此,海川码垛机器人的应用越来越广泛。根据抓取物体的形状、尺寸、重量、材料和操作要求,有多种结构形式,如夹具材料抓取、吸盘材料爪、模拟多手指抓取、夹板支撑抓取等。根据产品包装是纸箱、编织袋、桶、散装、重量、单面积大小等,分为瓶爪、钳爪、快门爪、吸盘爪、瓶、堆叠爪、夹、抓爪、桶爪等:
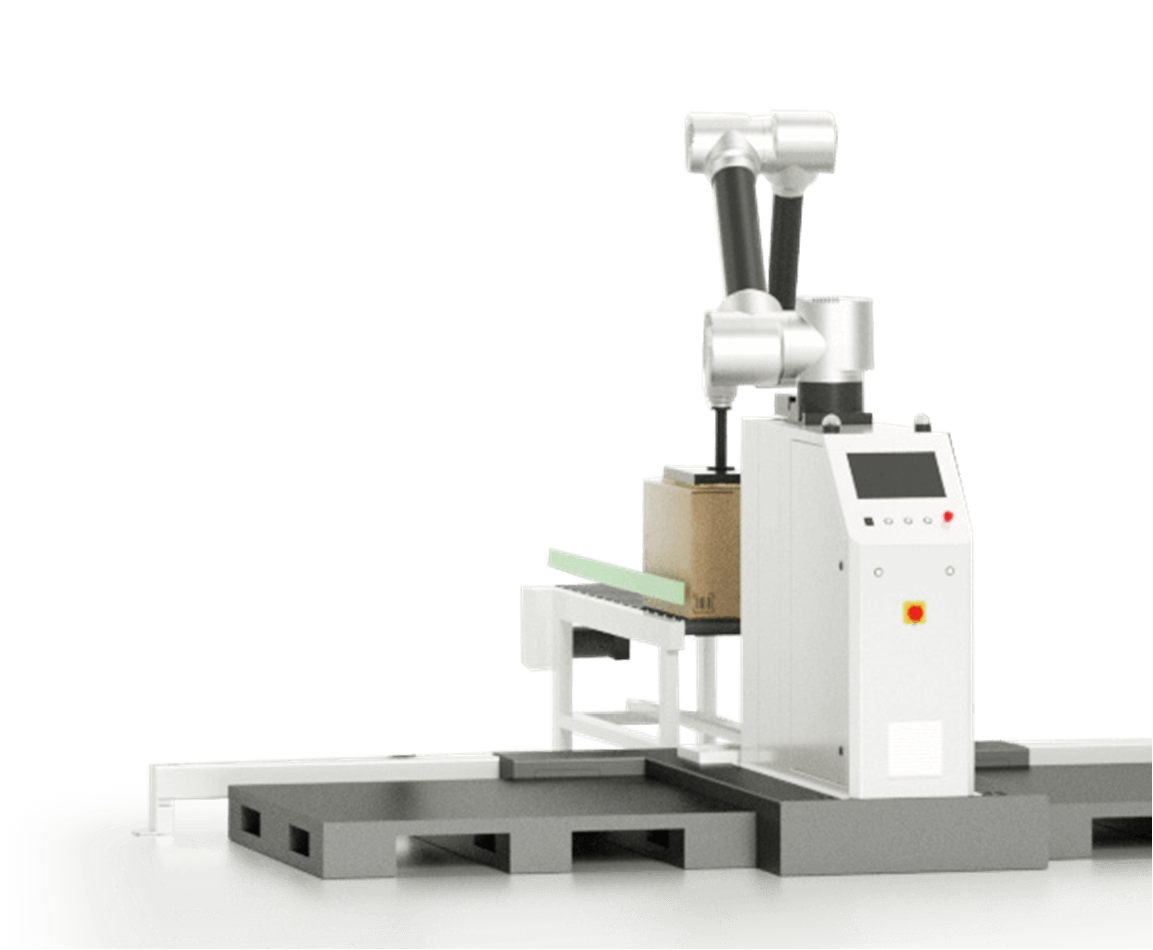
码垛机器人的抓手设计需要从多个方面考虑,如抓手工作目标的重量、尺寸和材料。对于不同对象的工件,选择不同的爪子。例如,板材工件可以采用真空吸附;磁性吸盘可用于磁性介质;对于PVC材料袋,采用夹紧式。
对于堆垛机器人爪前端的输送带结构,材料袋抓取的滚筒输送带一般有国家标准,需要使用标准接口,对于带式输送带,应考虑如何实现。
机器人的经济工作模式采用电力、气动和液压作为电源。所涉及的结构及其制造、使用和维护成本不同。现场环境提供的电力可以降低制造成本。
码垛机器人型号的选择,机器人的最大负载能力和工作半径,机器人的惯性,机器人的价格,考虑到抓手的设计。
码垛机器人抓住目标的重量、大小和材料,为不同对象的工件选择不同的爪子,如板材。
码垛机器人运动端工件的空间布局,抓手是否适合生产环境。
抓取物料决定海川码垛机器人抓取物的类型,如抓取物、夹板式或真空吸盘式抓取物、吸盘式抓取物等。
本文海川码垛机器人的设计浅谈:https://www.hcswell.com/industry-news/216.html,海川四维智能科技版权所有,抄袭必究!