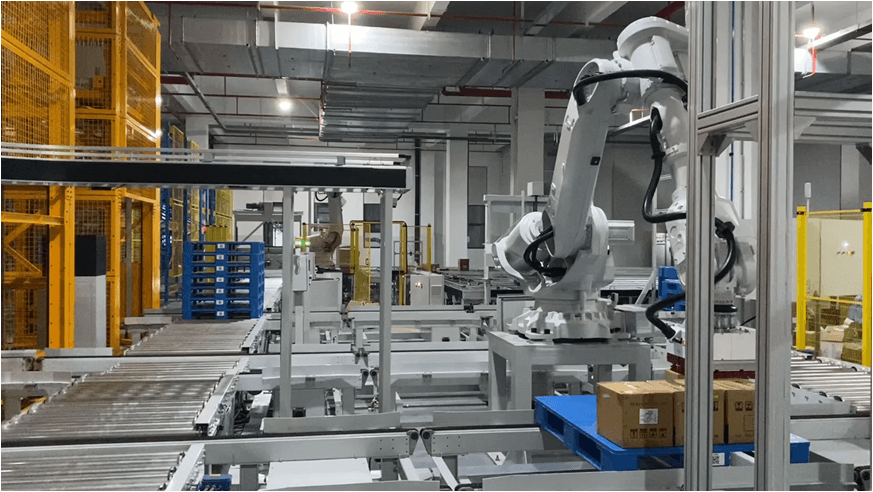
海川agv复合机器人通过易⽤的客⼾端实施软件,结合调度系统,可轻松实现机器⼈建图、定位、导航,以及任务部署,多机调度,匹配到现有⼯作流,快速适应⼯⼚⽣产节拍,并和⼯⼚的ERP、MES系统⽆缝对接,从⽽实现机器⼈投产效益。

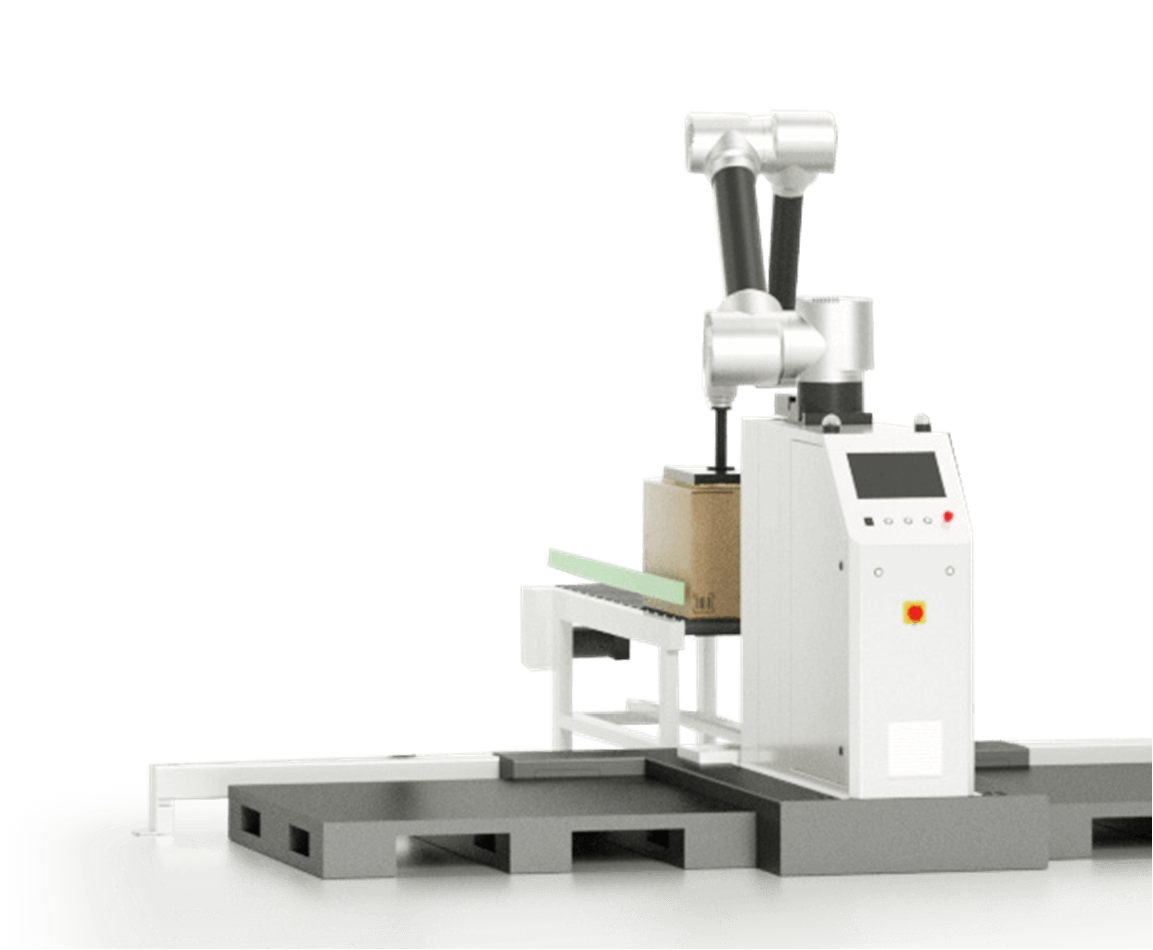
1、海川agv复合机器人机械设计。
2、导向定位技术是AGV小车技术研究的核心部分。导向定位技术的优劣将直接影响AGV小车的性能稳定性、自动化程度和应用实用性。
3、 驱动技术
4、路径规划和任务调度技术。
(1)出行路径规划。驾驶路径规划就是解决AGV从起点到目标点的路径问题,即“如何走”的问题。目前,国内外已有大量人工智能算法应用于AGV路径规划,如蚁群算法、遗传算法、图论、虚拟力法、神经网络和算法等。
(2)作业任务调度。作业任务调度是指根据当前作业的请求处理任务,包括根据一定的规则对任务进行排序和安排合适的AGV处理任务。需要综合考虑每个AGV的任务执行次数、供电时间、工作和空闲时间等多个因素,实现资源的合理应用和再优化配置。
(3)多AGV协调。多机协调是指如何有效地利用多个AGV来完成一项复杂的任务,并解决过程中可能出现的系统冲突、资源竞争和死锁等一系列问题。目前常用的多机协调方法有分布式协调控制方法、道路交通规则控制方法、基于多agent理论的控制方法和基于Petri网理论的多机器人控制方法。
5、运动控制技术。不同的车轮机构和布局具有不同的转向和控制模式。目前,AGV小车的转向和驱动方式包括以下两种:两轮差速驱动转向方式,即两个独立的驱动轮同轴平行固定在车体中部,其他自由万向轮支撑它们。控制器通过调节两个驱动轮的速度和转向,可以实现任意转弯半径的转向;方向盘控制转向模式,即通过控制方向盘的偏航角来实现转向,偏航角受小转弯半径的限制。控制系统通过安装在驱动轴上的编码器反馈形成闭环系统。目前,基于两轮差速驱动的AGV路径跟踪方法主要有PID控制方法、再优化预测控制方法、专家系统控制方法、神经网络控制方法和模糊控制方法。
6、 信息融合技术信息融合是指利用多源信息的关联和组合,充分识别、分析、估计和调度数据,完成发布决策和处理信息的任务,并适当估计周围环境和战争条件。目前,飞行员领域研究和应用的信息融合技术主要有卡尔曼滤波、贝叶斯估计和D-S证据推理,其中卡尔曼滤波应用最为广泛。卡尔曼滤波具有良好的实时性,但它是基于严格的数学模型。当制导模型存在较大的建模误差或系统特性发生变化时,往往会导致滤波发散。为了提高滤波算法的鲁棒性和自适应能力,可以根据AGV的制导要求和特点,研究合适的自适应卡尔曼滤波算法、鲁棒滤波算法或智能滤波(如模糊推理、神经网络、专家系统)方法。
7、 安全保护技术避障感应技术(AGV)配备了自动测距系统。测量障碍距离后,根据不同的障碍距离进行多级减速和缓冲停车,并实时定量测量障碍距离。同时,海川AGV复合机器人采用覆盖障碍物测量,不受各种外部干扰因素的影响,抗干扰能力很强。
本文海川agv复合机器人关键技术有哪些?:https://www.hcswell.com/industry-news/179.html,海川四维智能科技版权所有,抄袭必究!