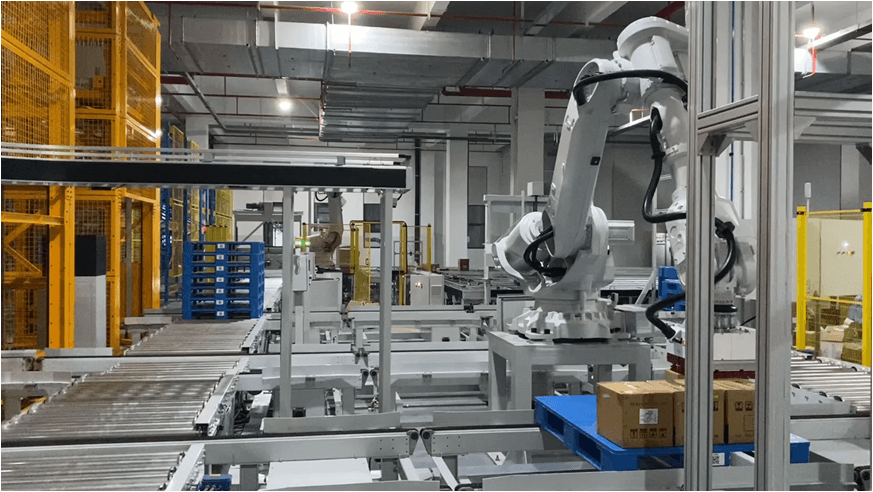
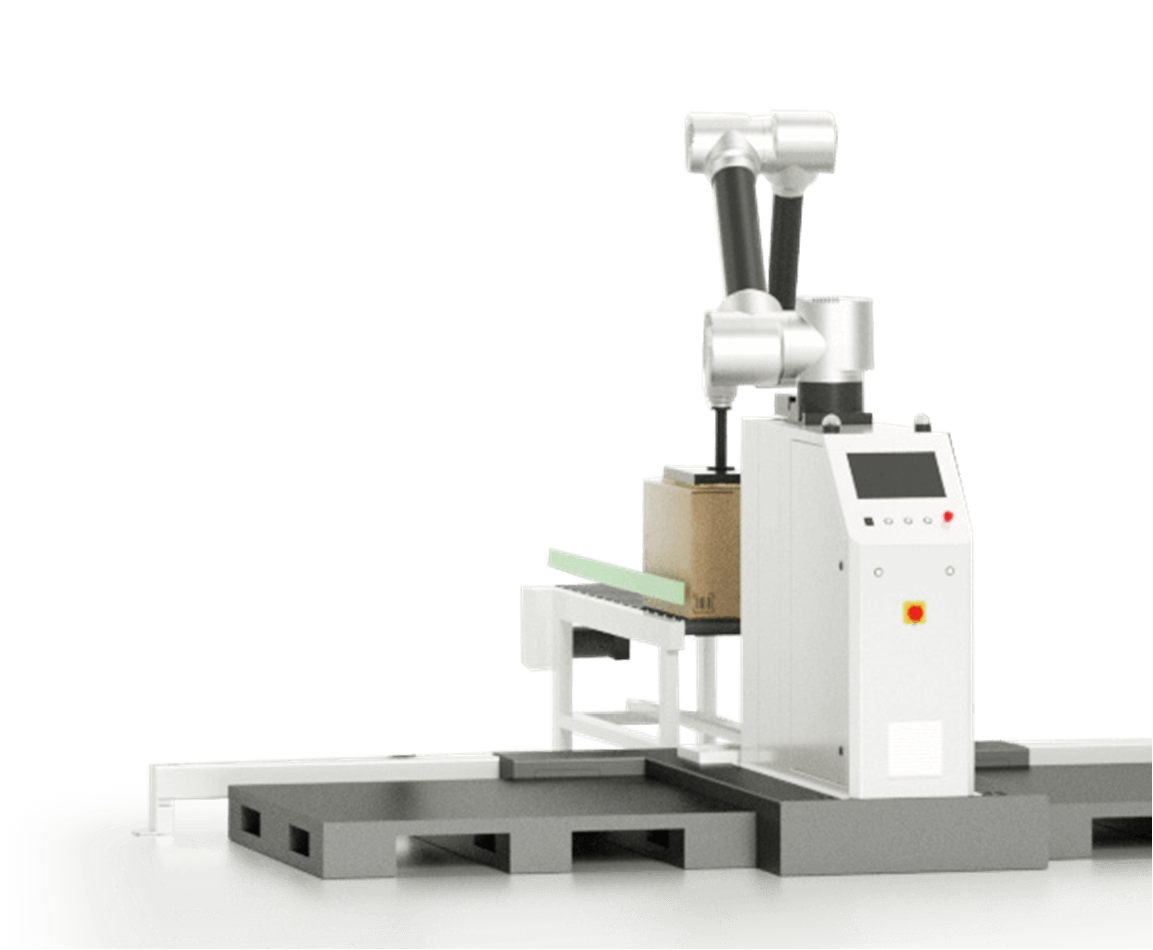
海川码垛机器人夹持式手部适用于具有形状规则、表面粗糙特点的纸箱包装类产品的搬运。为增加码垛机器人夹持式手部的通用性,通常将它设计为平移型,当它在夹持时与产品进行面触碰,放开后手爪有一定的距离的开距。通过驱动来拉伸一侧的手爪或使两侧手爪同步运动,从而保证产品顺利进入或脱开手爪。

一、海川码垛机器人平移夹持式手部驱动
平移夹持式手部驱动一般挑选气动或伺服。气动驱动的制造成本低、维护成本低,但会增加手部质量,影响机械手的搬运负载。在手部装置固定后,如果搬运产品的尺寸和质量发生变化,只能通过调节供气压力来修改夹紧力,在变化很大的情况下无法满足要求。伺服驱动平移夹持式手部制造成本高、维护成本高,整体质量较轻,对机械手搬运负载的影响低,可以在电机的控制器上轻易地调节螺距来操纵夹紧力,以满足搬运产品的尺寸和质量变化。海川码垛机械手的应用程序里所需用精准定位的仅仅只需要两个点,一个是抓起点,一个是放置点,除了这两个点,之间其他的轨道全部由计算机来实现操纵。

二、海川码垛机器人平移夹持式手部手爪
平移夹持式手部的手爪可以设计为整体式,也可以设计为镂空式。镂空式手爪虽然可以减少材料的使用、减轻自重,但同时会减小手爪与搬运产品之间的触碰面积,从而降低承载能力,所以不适合于重载、表面光滑的搬运产品或包装;对于具有形状不规则特点的桶料包装类产品,一般也采用平移夹持式手部进行搬运,只是手爪要对于桶料包装的形状和尺寸进行特殊设计,通常设计为V形;对于具有形变量大、规则不一特点的料袋包装产品的搬运,需用将手部设计为回转抓取式。将手爪结构设计为全刨或半刨型,通过驱动来操纵手爪的回转,来实现产品抓取时的收放,并避免损坏料袋包装,同时确保料袋变形小、搬运平稳。对于搬运不同尺寸的料袋包装产品,在满足驱动力的条件下,只需修改手爪的强度和尺寸就可以实现。

三、海川码垛机器人机械手的选用
实际工程应用中,码垛机是否挑选机械手,除了使用需求之外,还要综合考虑空间、投入、成本回收等因素。在挑选机械手的手部时,主要是考虑到搬运产品的包装特点。在机械手码垛机中,由于真空系统对于光滑平整的产品或包装具有天然的吸放优势,这类产品或包装的码垛应优先选择吸附式手部。另外,相比于机械式手部,吸附式手部功能更多、设计更简单、组装更方便、更高效、节能,但有噪声、吸盘磨损消耗大。
标准规格的海川码垛机器人的堆垛速度可以达到二十五箱/分钟,对于其它所需要的特殊的需求和功能,还可以进行量身订做。
本文海川码垛机器人夹持式手部:https://www.hcswell.com/industry-news/152.html,海川四维智能科技版权所有,抄袭必究!