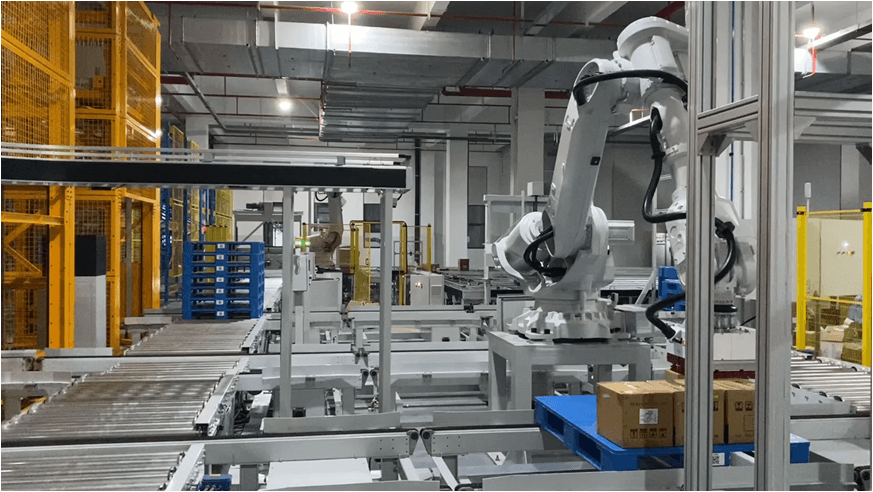
在当下这个人工智能不断更新不断进步的时代,机器人已经逐渐代替了一些人力进行了工作;机器人的出现同时也标志着传统制造业向现代化制造业的转变,机器人的视觉形成一般采用的是结构光系统获取目标的俯视三维模型,包括获取所述结构光系统的相机和投影仪的内外参数;获取所述投影仪投射到所述目标零件的编码图案;通过所述相机获取所述编码图案的图像;这三种方式合成机器人视线。

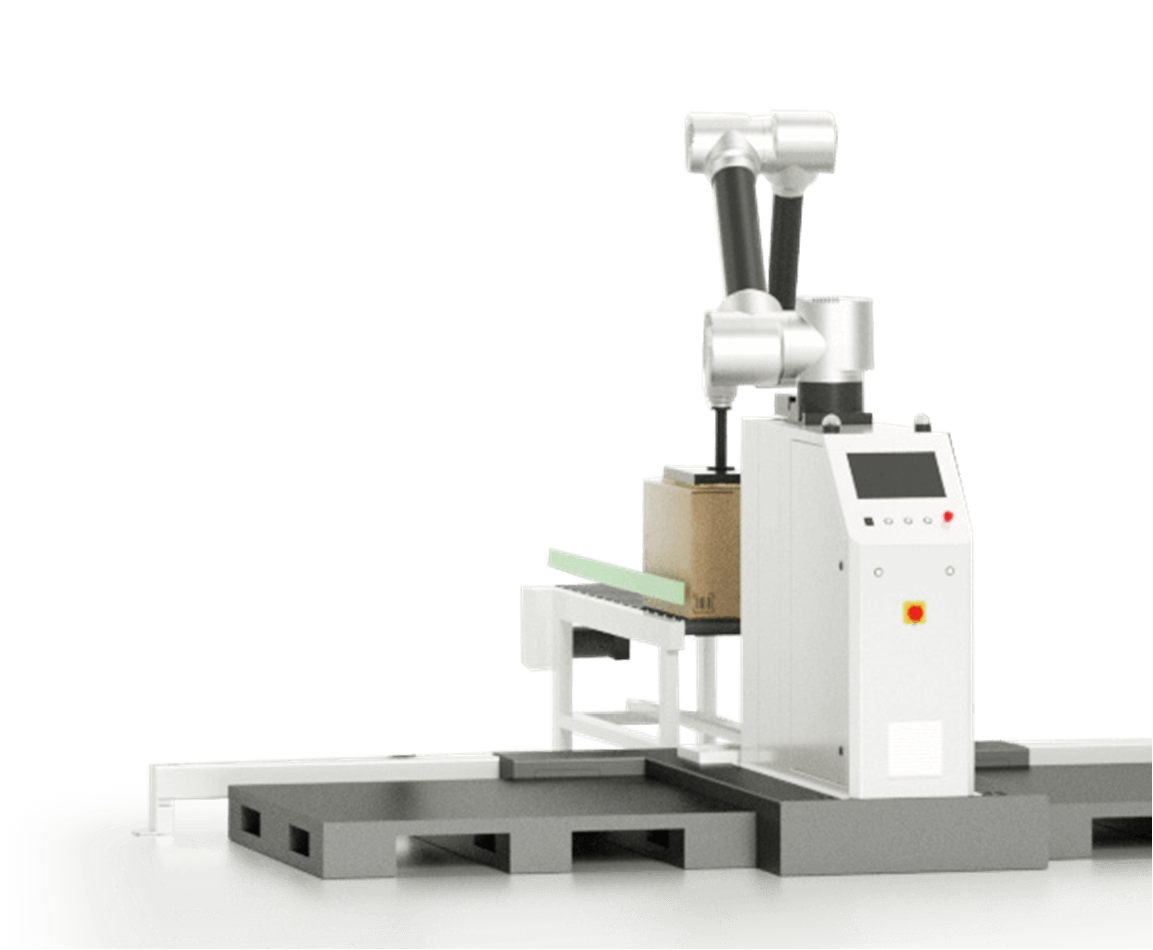
一种基于视觉的机器人分拣方法,首先采用结构光系统获取目标零件的俯视三维模型;并将所述目标零件的俯视三维模型与预先构建的基准模型库中的基准零件模型进行匹配,获得所述目标零件的类型以及所述目标零件的俯视三维模型与所述对应的基准零件模型之间的变换矩阵;然后根据所述变换矩阵和所述基准零件模型,获得所述目标零件的第一位置信息;并根据所述目标零件的第一位置信息,获得机器人坐标下的第二位置信息;在根据所述第二位置信息,对所述目标零件进行拾取,并结合所述目标零件的类型以实现零件的分拣。由于首先获取了目标零件的俯视三维模型,并将俯视三维模型与构建的基准零件模型进行匹配,这样可以得到目标零件的类型,然后根据俯视三维模型到基准零件模型的变换矩阵和所述基准零件模型,获得目标零件的第一位置信息,即拾取的位置,再通过坐标转换,获得第二位置信息,从而完成准确拾取和分拣,相对于现有技术中采用二维图像的匹配方法而言,本发明的方法可以实现对任意摆放的多个零件进行类型和位姿识别,从而完成分拣。解决了现有技术中零件抓取方法存在无法进行识别和分拣的技术问题。
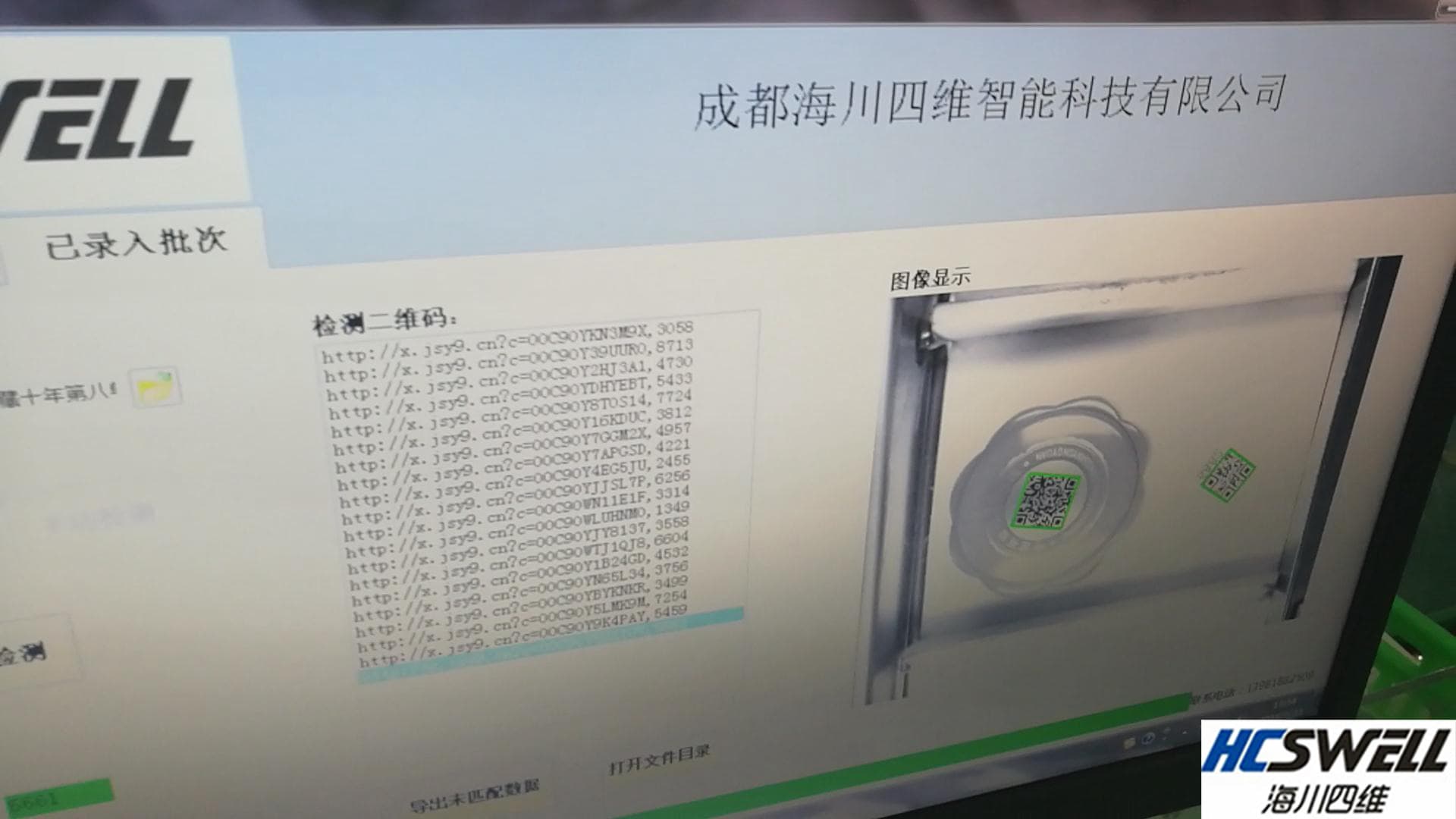
机器人的视觉呈现方法主要包括:采用结构光系统获取目标零件的俯视三维模型;将所述目标零件的俯视三维模型与预先构建的基准模型库中的基准零件模型进行匹配,获得所述目标零件的类型以及所述目标零件的俯视三维模型与所述对应的基准零件模型之间的变换矩阵.
本文机器人是怎么利用视觉进行分拣的呢?:https://www.hcswell.com/industry-news/146.html,海川四维智能科技版权所有,抄袭必究!